





























Installation
4
-
18
4.2
Ambient conditions and installation location
When installing a robot, it is necessary to satisfy the undermentioned environmental
conditions:
•
Ambient temperature: From 0°C to +45°C.
•
Air humidity: 20% to 80% relative humidity (non-condensing).
•
Free of corrosive gases, liquids, or explosive gases. No water, oil or dust and free from
excessive electrical noise (plasma).
•
Free from excessive vibration (Vibration acceleration: 4.9 m/s² [0.5 G] or less).
•
Maximum unevenness of the support surface of the robot base: 0.5 mm.
4.3
Installation example
1. At the first set out, anchor the base plate firmly onto the floor.
2. The robot base is tapped for 8 mounting holes. Fix the robot base with the screws M20
(Strength category 12.9) Minimum length: 80 mm.
3. Next, fix the robot base to the base plate. Tighten the hexagon head bolts and anchor
bolts securely so that they will not work loose during operation (see figure „Mounting of
the robot on the base plate“).
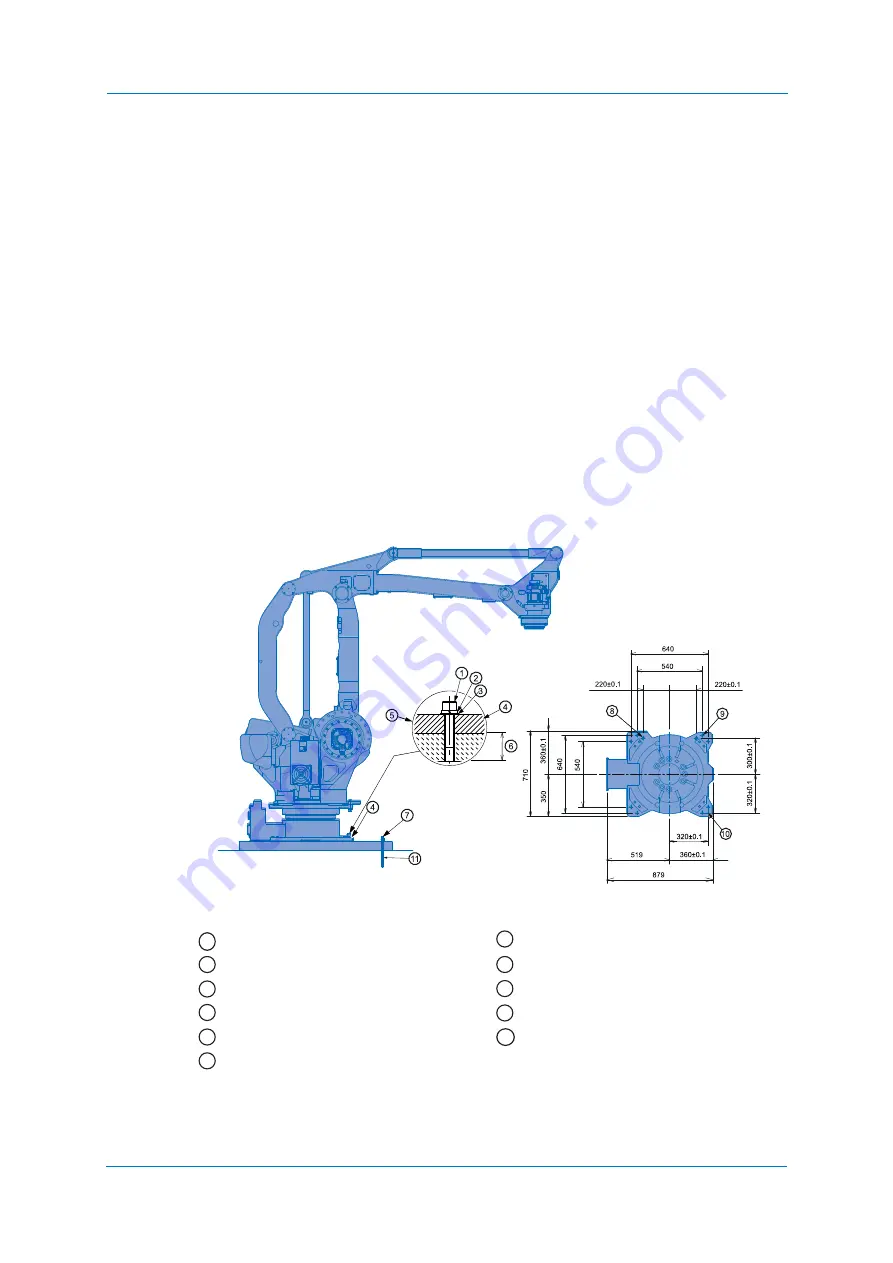
Fig. 4-1: Mounting the robot on the base plate
8 Screws M20
Anchor bolt (M24 or greater)
Spring washer
2 holes Ø 20
H7
Washer
8 holes Ø22
Robot base
Hole Ø 12
H7
Base plate
adhesive
at least 40 mm
1
7
2
8
3
9
4
10
5
11
6







































































