





























Wiring
5
-
21
5
Wiring
DANGER!
Danger to life due to electric shock, risk of fire due to short circuit.
Wiring must be performed by authorized or certified personnel.
Follow the instructions given below before wiring.
Make sure that the earthing resistance does not exceed 0.1 Ω.
Turn OFF the main power supply.
Put up the warning sign prescribed, e.g.
"Do not turn the power on!"
.
Install a switch-on guard as prescribed.
5.1
Grounding
Follow the applicable electrical installation standards and wiring regulations for earthing.
The cable cross-section must be 6 mm² or more.
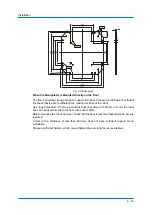
With regard to the direct connection of the earthing cable, see figure “Earthing connection”
NOTICE
Note on the earthing connection
Never use the earthing cable together with an earthing cable of, for example:
A different electrical consumer
A different motor-driven consumer
Welding devices, etc.
If the earthing cable is laid in a metal duct, metal conduit or some other metal system, this
must be earthed in accordance with the applicable electrical installation standards.
Summary of Contents for MPL500-J00
Page 1: ...ROBOTICS MPL500 J00 YR MPL0500 J00 Operating and Maintenance Manual ...
Page 36: ...Technical data 6 36 6 5 1 2 Stop position L axis 100 deflection ...
Page 37: ...Technical data 6 37 6 5 1 3 Stop position U axis 100 deflection ...
Page 61: ...Maintenance and inspection 9 61 Air outlet cap Joint 80 9 0 170 1 1 2 2 2 1 2 ...







































































