




























Maintenance and inspection
9
-
64
9.4
Home position calibration
Follow the safety instructions described in section 1.7 "Safety" on page 8 .
NOTICE
Teaching or playback are not possible before the completion of the home position
calibration.
Teach and save a second testing position immediately after installing the robot system.
This second testing position can be determined, e.g., by using tips (screw-in tip on the
torch, fixed counterpart on the cell wall) and stored in the robot controller.
After a collision or in the event of track deviations it is recommended not to re-teach
individual jobs, but to approach and reset the basic position and/or the second home
position.
After each collision or emergency stop situation the robot must be moved to its basic
position in setup mode and its home position must be checked.
In a system with two or more Robots, the home position of all the Robots must be
calibrated before starting teaching or playback.
For more information, see also system setup in the manual or contact your YASKAWA
branch.
When setting the home position, the position of the absolute encoder must match it.
Although this operation is performed prior to shipment at the factory, the following cases
require this operation to be performed again.
•
Change in the combination of the robot and robot controller.
•
Replacement of the motor or absolute encoder.
•
Clearing stored memory (by replacement of the main CPU board, weak battery pack,
etc.).
•
Home position deviation caused by hitting the robot.
Home position calibration
To calibrate the home position mark on each axis, use the axis keys, so that the robot can
take their position as home position.
There are two operations for home position calibration:
•
All the axes can be moved at the same time.
–
If the combination of robot and main board (CPU) has been changed, reset the
home position. The home position set by moving all axes simultaneously.
•
Axes can be moved individually.
–
If you have replaced the motor or the absolute encoder, reset the home position for
the individual axes.
If the absolute data of its posture for the home position is already known, set them again
after completing home position registration.
NOTICE
The window for calibrating the home position is only displayed if SAFTEY mode is selected
as the MANAGEMENT mode.
9.4.1
Registering all axes at the time
1. Select {ROBOT} from the main menu.
Summary of Contents for MPL500-J00
Page 1: ...ROBOTICS MPL500 J00 YR MPL0500 J00 Operating and Maintenance Manual ...
Page 36: ...Technical data 6 36 6 5 1 2 Stop position L axis 100 deflection ...
Page 37: ...Technical data 6 37 6 5 1 3 Stop position U axis 100 deflection ...
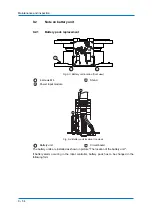
Page 61: ...Maintenance and inspection 9 61 Air outlet cap Joint 80 9 0 170 1 1 2 2 2 1 2 ...






































































