




























C-2
166006-1CD
166006-1CD
Appendix C
B
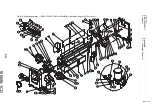
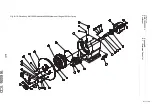
RM2-755/1255SL
Positioner
ANSI/RIA R15.06-2012 American National Standard for Industrial
Robots and Robot Systems
This standard provides guidelines for the manufacture and integration of
Industrial Robots and Robot Systems with emphasis on their safe use, the
importance of risk assessment and establishing personnel safety. This
standard is a national adoption of the International Standards ISO 10218-
1 and ISO 10218-2 for Industrial Robots and Robot Systems, and offers a
global safety standard for the manufacture and integration of such
systems.
ArcWorld
Robotic welding systems delivering flexible integrated robotics into the
welding processes. ArcWorlds can be configured with multiple
Manipulators, a heavy-duty Positioner or servo-controlled external axes
for coordinated motion.
Automatic Mode
Axis
A direction used to specify the Manipulator motion in a linear or rotary
mode. (ISO 8373)
Axis Backlash
Play between drive train gears
Axis Interference
The Axis Interference Area is a function that judges the current position of
each axis and outputs a signal based on whether the current position is
within a predefined range.
B
Base
The stable platform to which an industrial robotic arm is attached.
Base Coordinate System
The Base Coordinate System (sometimes referred to as World Coordinate
System) defines a common reference point for a cell or application. This is
useful when using multiple Manipulators or devices as positions defined in
Base Coordinates will be the same for all Manipulators and devices.
Burn-in
Burn-In is a robot testing procedure where all components of the robot are
operated continuously for an extended period of time. This is done to test
movement and movement programming of the robot at early stages to
avoid malfunctions after deployment.
119 of 145































































