




























C-4
166006-1CD
166006-1CD
Appendix C
C
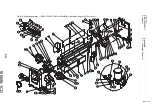
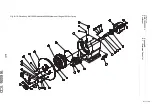
RM2-755/1255SL
Positioner
Centrifugal Force
When a body rotates about an axis other than one at it's center of mass, it
exerts an outward radial force called centrifugal force upon the axis, which
restrains it from moving in a straight tangential line. To offset this force,
the robot must exert an opposing torque at the joint of rotation.
Circular Motion Type
A calculated path that the robot executes, and is circular in shape.
Clamp
An end-effector which serves as a pneumatic hand that controls the
grasping and releasing of an object. Tactile, and feed-back force sensors
are used to manage the applied force to the object by the clamp. See
Clamping
The maximum permissible force acting on a body region, resulting from a
Manipulator collision where the period of contact results in a plastic
deformation of a person’s soft tissue.
Clamping Force
When contact can cause a body part(s) to be clamped.
Closed-loop
Control achieved by a by means of feedback information. As a
Manipulator is in action, its sensors continually communicate information
to the Controller, which is used to further guide the Manipulator within the
given task. Many sensors are used to feed back information about the
Manipulator's placement, speed, torque, applied forces, as well as the
placement of a targeted moving object, etc. See
Command Interpreter
A module or set of modules that determines what the received command
means. The command is broken down into parts (parsed) and processed.
Command Position
The endpoint position of a robot motion that the Controller is trying to
achieve.
Compliance
Displacement of a Manipulator in response to a force or torque. A high
compliance means the Manipulator moves a good bit when it is stressed.
This is called spongy or springy. Low compliance would be a stiff system
when stressed.
Configuration
The arrangement of links created by a particular set of joint positions on
the robot. Note that there may be several configurations resulting in the
same endpoint position.
Contact Sensor
A device that detects the presence of an object or measures the amount
of applied force or torque applied on the object through physical contact
with it. Contact sensing can be used to determine location, identity, and
orientation of work pieces.
121 of 145



























































