





























C-8
166006-1CD
166006-1CD
Appendix C
F
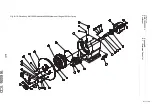
RM2-755/1255SL
Positioner
Expandability
Being able to add resources to the system, such as memory, larger hard
drive, new I/O card, etc.
External Force Limit
The threshold limit where the robot moves to or retains position, even
when external forces are applied (provided that forces do not exceed
limits that would cause an error).
F
Feedback
The return of information from a Manipulator or sensor to the processor of
the robot to provide self-correcting control of the robot.
Feedback Control
A type of system control obtained when information from a robot or sensor
is returned to the robot Controller in order to obtain a desired robot effect.
and
Feedback Sensor
A mechanism through which information from sensing devices is fed back
to the robot's control unit. The information is utilized in the subsequent
direction of the robot's motion. See
Flexibility
The ability of a robot to perform a variety of different tasks.
Force Feedback
A sensing technique using electrical signals to control a robot end-effector
during the task of the end-effector. Information is fed from the force
sensors of the end-effector to the robot control unit during the particular
task to enable enhanced operation of the end-effector.
.
Force Sensor
A sensor capable of measuring the forces and torque exerted by a robot
and its wrist. Such sensors usually contain strain gages. The sensor
provides information needed for force feedback. See
Forward Kinematic Solution
The calculation required to find the endpoint position, given the joint
positions. For most robot topologies this is easier than finding the inverse
kinematic solution.
Forward Kinematics
Computational procedures which determine where the end-effector of a
robot is located in space. The procedures use mathematical algorithms
along with joint sensors to determine its location.
Frame
A coordinate system used to determine a position and orientation of an
object in space, as well as the robot's position within its model.
125 of 145




































































