




























4 Operation
4.2.8 Stopping Linear Servomotor after Receiving Servo OFF Command or Alarm Occurrence
4-20
(2) Stopping Method for Linear Servomotor When an Alarm Occurs
There are two type of alarms (Gr.1 and Gr.2), depending on the stopping method when an alarm occurs.
Select the stopping method for the linear servomotor when an alarm occurs using Pn001.0 and Pn00B.1.
The stopping method for the linear servomotor for a Gr.1 alarm is set to Pn001.0.
The stopping method for the linear servomotor for a Gr.2 alarm is set to Pn00B.1.
Refer to the information on alarm stopping methods
in
8.1.1 List of Alarms
.
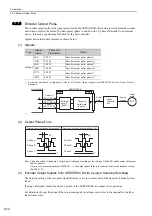
Stopping Method for Linear Servomotor for Gr.1 Alarms
The stopping method of the linear servomotor when a Gr.1 alarm occurs is the same as that for the linear ser-
vomotor after the servo OFF command is received.
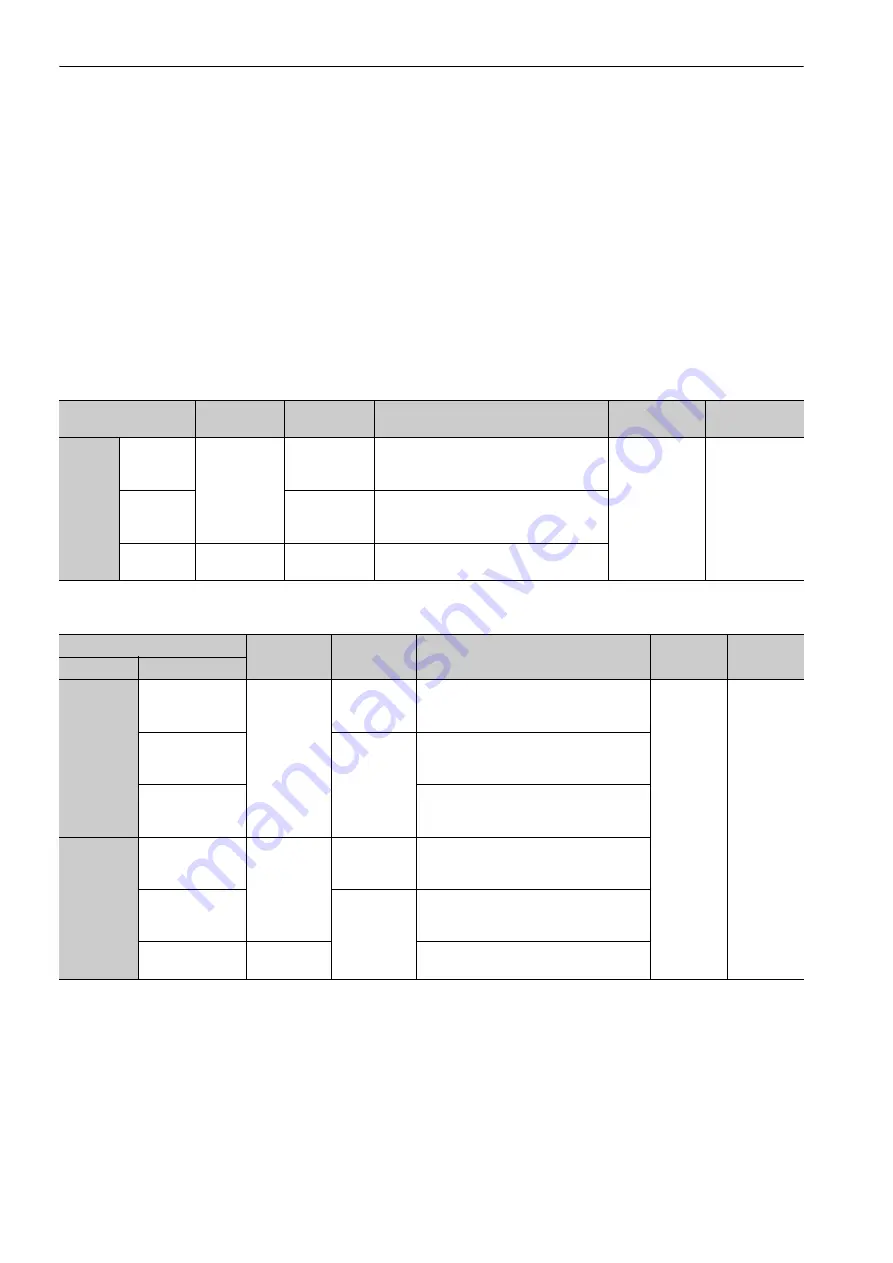
Stopping Method for Linear Servomotor for Gr.2 Alarms
Note: The setting of Pn00B.1 is effective for position control and speed control. Pn00B.1 will be ignored for force control
and only the setting of Pn001.0 will be valid.
Parameter
Stop Mode
Mode After
Stopping
Meaning
When Enabled Classification
Pn001
n.
0
Stop by
dynamic brake
Dynamic
Brake
Stops the linear servomotor by dynamic
braking (DB), then holds it in Dynamic
Brake Mode. [Factory setting]
After restart
Setup
n.
1
Coast
Stops the linear servomotor by dynamic
braking (DB), then places it into Coast
Mode.
n.
2
Coast to a stop Coast
Stops the linear servomotor by coasting,
and continues in Coast Mode.
Parameter
Stop Mode
Mode After
Stopping
Meaning
When
Enabled
Classifica-
tion
Pn00B
Pn001
n.
0
[Factory
setting]
n.
0
[Factory setting]
Zero-speed
stopping
Dynamic
Brake
Stops the linear servomotor by zero-
speed stop, then holds it in Dynamic
Brake Mode.
After
restart
Setup
n.
1
Coast
Stops the linear servomotor by zero-
speed stop, then places it into Coast
Mode.
n.
2
Stops the linear servomotor by zero-
speed stop, then places it into Coast
Mode.
n.
1
n.
0
[Factory setting]
Stops by
dynamic
brake
Dynamic
Brake
Stops the linear servomotor by dynamic
braking (DB), then holds it in Dynamic
Brake Mode.
n.
1
Coast
Stops the linear servomotor by dynamic
braking (DB), then places it into Coast
Mode.
n.
2
Coast to stop
Stops the linear servomotor by coasting,
and continues in Coast Mode.







































































