





























5 Adjustments
5.9.2 Using the Mode Switch (P/PI Switching)
5-62
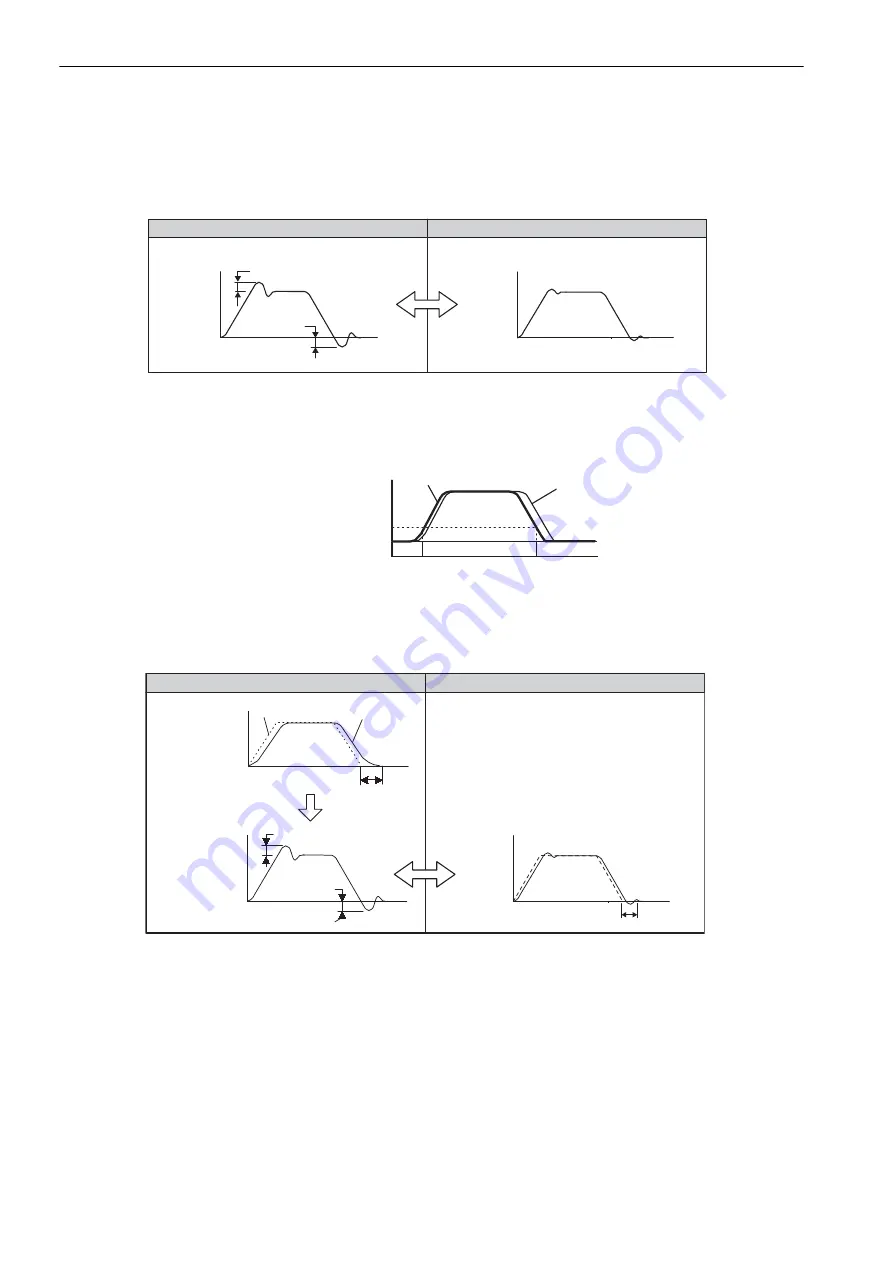
<Example>
If the mode switch function is not being used and the SERVOPACK is always operated with PI control, the
speed of the linear servomotor may overshoot due to force saturation during acceleration or deceleration. The
mode switch function suppresses force saturation and eliminates the overshooting of the motor speed.
Using the Speed Reference Level to Switch Modes
With this setting, the speed loop is switched to P control when the value of speed reference input exceeds the
speed set in Pn181.
<Example>
In this example, the mode switch is used to reduce the settling time. It is necessary to increase the speed loop
gain to reduce the settling time. Using the mode switch suppresses overshooting when speed loop gain is
increased.
Without Mode Switching
With Mode Switching
Overshoot
Overshoot
Motor
speed
Time
Motor
speed
Time
Speed reference
Speed
Motor
speed
Time
P Control
PI Control
Pn181
PI
Without Mode Switching
With Mode Switching
Motor
speed
Speed reference
Long settling time
Increase speed loop gain.
Settling time
Motor
speed
Overshoot
Overshoot
Motor
speed
Time
Motor
speed
Time
Time







































































