





























6.3 FT41 Specification
6.3.1 List of Servo Parameters
6-75
6
Parameter Lists
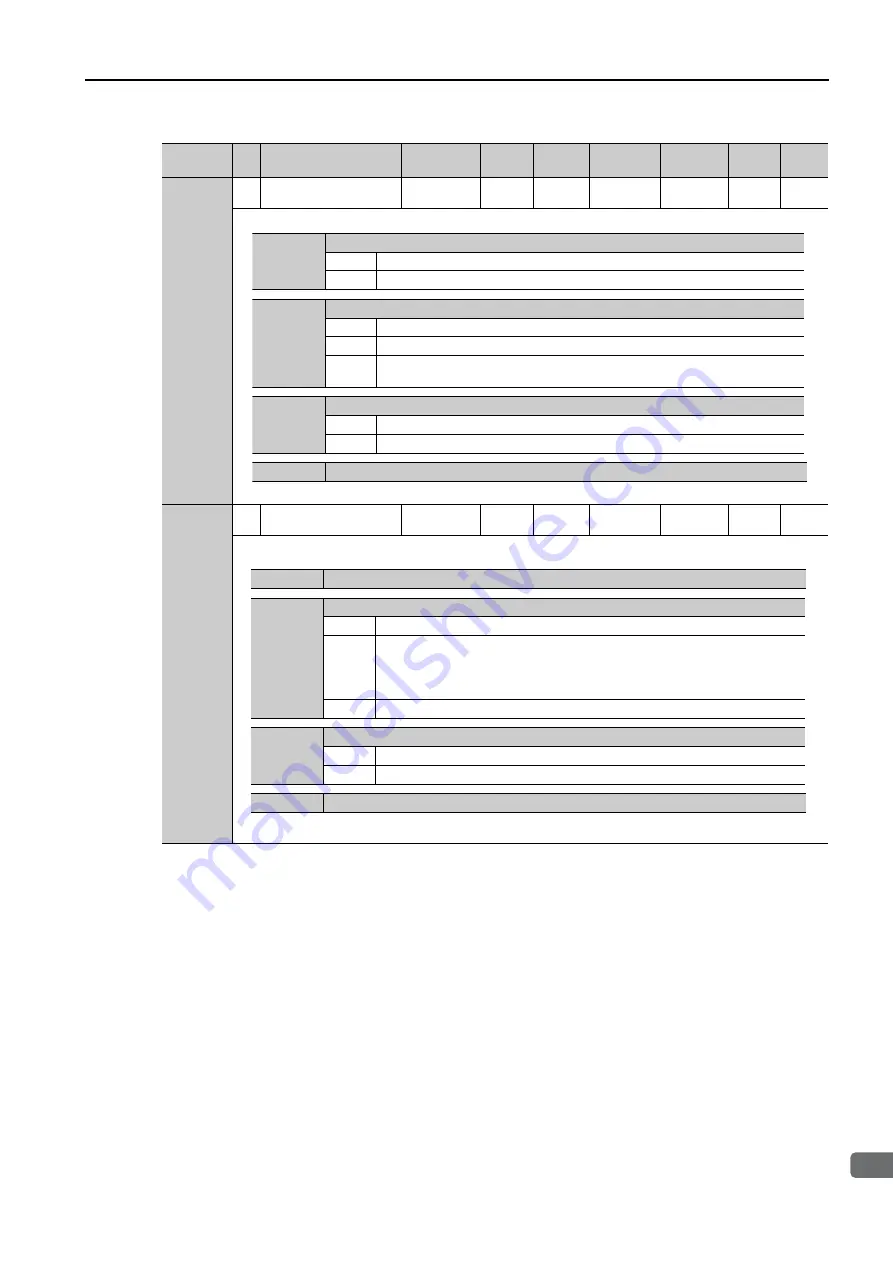
Pn008
2
Application Function
Selections 8
0000h to
7121h
–
4000h
Rotary
After
restart
Setup
*1
Pn009
2
Application Function
Selections 9
0000h to
0121h
–
0010h
All
After
restart
Tuning
*1
Continued on next page.
Continued from previous page.
Parameter
No.
Size
Name
Setting
Range
Setting
Unit
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
Refer-
ence
n.
X
Low Battery Voltage Alarm/Warning Selection
0
Output alarm (A.830) for low battery voltage.
1
Output warning (A.930) for low battery voltage.
n.
X
Function Selection for Undervoltage
0
Do not detect undervoltage.
1
Detect undervoltage warning and limit torque at host controller.
2
Detect undervoltage warning and limit torque with Pn424 and Pn425 (i.e., only
in SERVOPACK).
n.
X
Warning Detection Selection
0
Detect warnings.
1
Do not detect warnings except for A.971.
n.X
Reserved parameter (Do not change.)
n.
X
Reserved parameter (Do not change.)
n.
X
Current Control Mode Selection
0
Use current control mode 1.
1
•
SERVOPACK Models SGD7S-R70A, -R90A, -1R6A, -2R8A, -5R5A, and
-7R6A: Use current control mode 1.
•
SERVOPACK Models SGD7S-120A, -180A, -200A, -330A, -470A, -550A,
-590A, and -780A: Use current control mode 2.
2
Use current control mode 2.
n.
X
Speed Detection Method Selection
0
Use speed detection 1.
1
Use speed detection 2.
n.X
Reserved parameter (Do not change.)
Summary of Contents for SERVOPACK Sigma 7 Series
Page 52: ...3 7 Monitoring 3 23 ...







































































