





























2.2 External Dimensions
2-8
2.2
External Dimensions
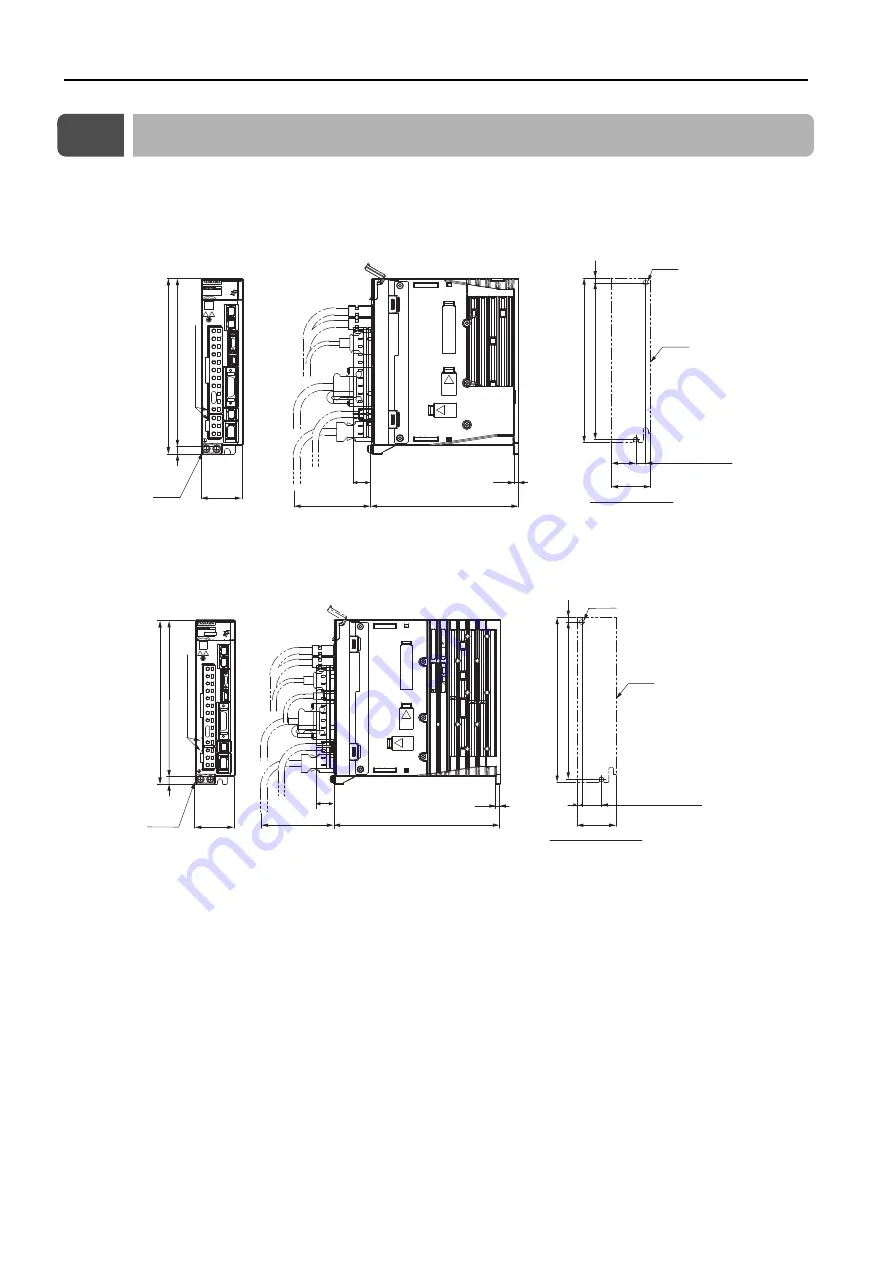
All SERVOPACKs that support the dynamic brake hardware option specifications are base-
mounted. The external dimensions are the same for all interfaces.
•
Three-Phase, 200 VAC: SGD7S-R70A, -R90A, and -1R6A
Note: There are no dynamic brake resistor terminals.
•
Three-Phase, 200 VAC: SGD7S-2R8A; Single-Phase, 100 VAC: SGD7S-R70F, -R90F, and
-2R1F
Note: There are no dynamic brake resistor terminals.
Two
s
et
s
of terminal
s
2
×
M4
160
168
8
40
Ground
terminal
s
2 × M4
(75)
140
18
(4)
168
160 ±0.5 (mounting pitch)
5
Exterior
10 ±0.5 (mounting pitch)
Mounting Hole Diagram
25
40
Unit: mm
Approx. ma
ss
: 0.9 kg
Two
s
et
s
of terminal
s
160
168
8
Ground
terminal
s
2 × M4
40
170
18
(4)
(75)
20
±
0.5 (mounting pitch)
168
160
±
0.5 (mounting pitch)
5
2
×
M4
Exterior
Mounting Hole Diagram
40
5
Unit: mm
Approx. ma
ss
: 1.1 kg







































































