





























13.2 Modes of Operation
13.2.1 Related Objects
13-5
13
CiA402 Drive Pr
ofile
13.2
Modes of Operation
The SERVOPACK supports the following modes of operation.
•
Profile Position Mode
•
Homing Mode
•
Interpolated Position Mode
•
Profile Velocity Mode
•
Torque Profile Velocity Mode
•
Cyclic Sync Position Mode
•
Cyclic Sync Velocity Mode
•
Cyclic Sync Torque Mode
13.2.1
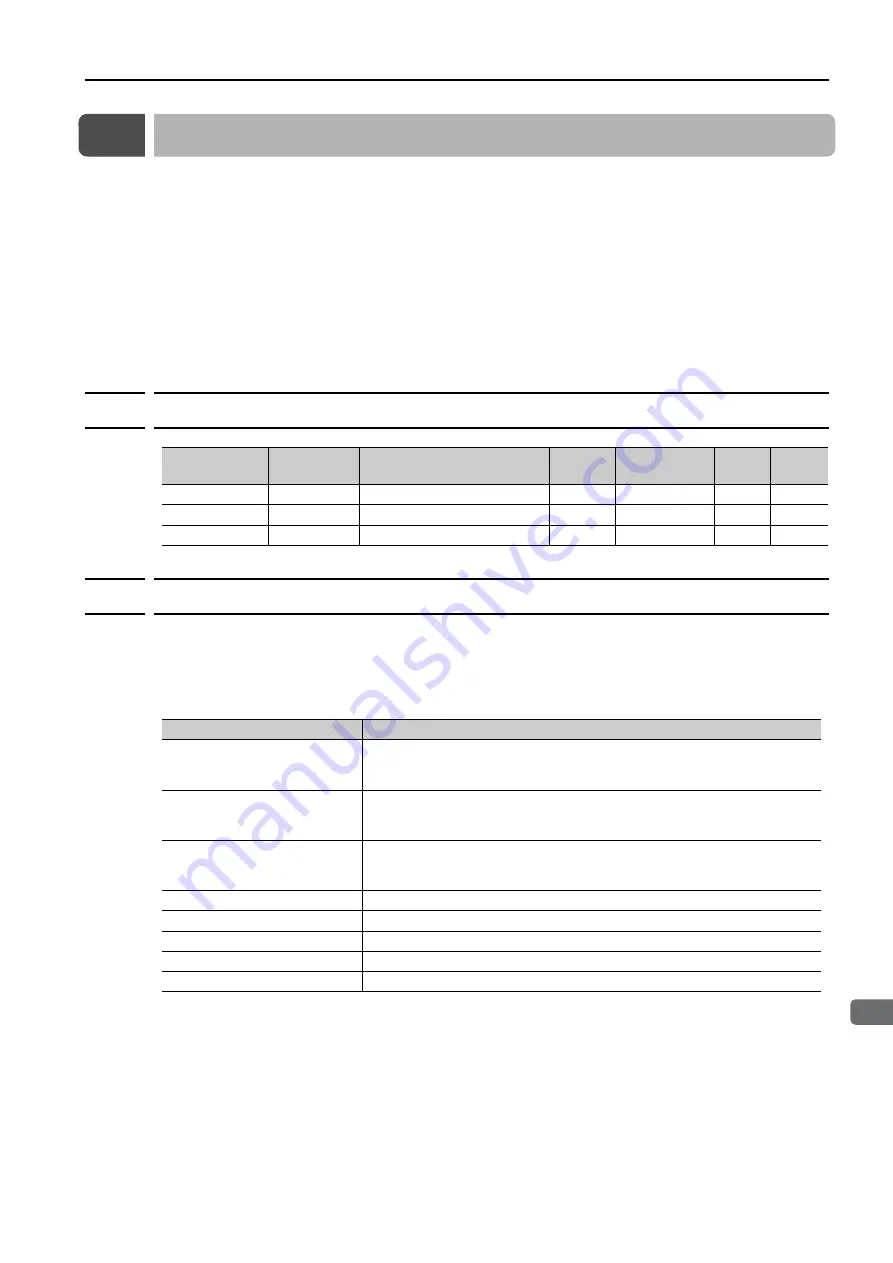
Related Objects
13.2.2
Dynamic Mode Changes
You can change the operation mode with
modes of operation
(6060 hex). The master must
update all operation mode-specific process data objects at the same time when it changes the
operation mode during motor operation. If the master selects a new operation mode, the SER-
VOPACK will change to the new operation mode immediately. The following table describes
operation when the operation mode is changed to a new mode.
Index
Subindex
Name
Access
PDO
Mapping
Unit
Data
Type
6060 hex
0
Modes of operation
RW
Yes
−
SINT
6061 hex
0
Modes of operation display
RO
Yes
−
SINT
6502 hex
0
Supported drive modes
RO
No
−
UDINT
New Operation Mode
Operation When Operation Mode Is Changed
Profile Position Mode
Controlword bit 4 = 0: The motor is stopped in the current position control
mode.
Controlword bit 4 = 1: A new positioning operation is started immediately.
Homing Mode
Controlword bit 4 = 0: The motor is stopped in the current position control
mode.
Controlword bit 4 = 1: Homing is started immediately.
Interpolated Position Mode
Controlword bit 4 = 0: The motor is stopped in the current position control
mode.
Controlword bit 4 = 1: A new positioning operation is started immediately.
Profile Velocity Mode
The new operation mode is started immediately.
Torque Profile Velocity Mode
The new operation mode is started immediately.
Cyclic Sync Position Mode
The new operation mode is started immediately.
Cyclic Sync Velocity Mode
The new operation mode is started immediately.
Cyclic Sync Torque Mode
The new operation mode is started immediately.







































































