





























8.13 Manual Tuning
8.13.2 Compatible Adjustment Functions
8-88
•
Linear Servomotors
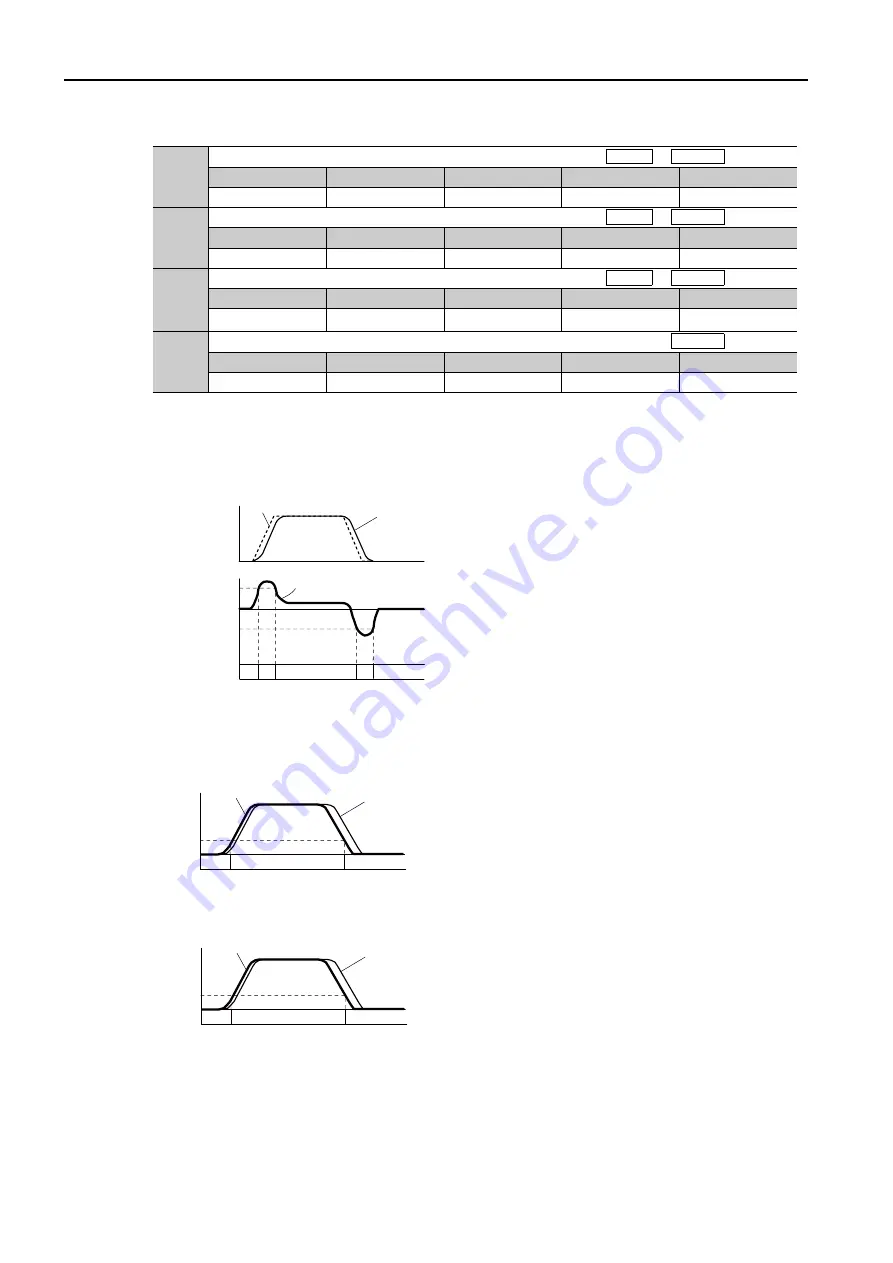
Using the Torque Reference as the Mode Switching Condition (Default Setting)
When the torque reference equals or exceeds the torque set for the mode switching level for
torque reference (Pn10C), the speed loop is changed to P control.
The default setting for the torque reference level is 200%.
Using the Speed Reference as the Mode Switching Condition
•
Rotary Servomotors
When the speed reference equals or exceeds the speed set for the mode switching level for a
speed reference (Pn10D), the speed loop is changed to P control.
•
Linear Servomotors
When the speed reference equals or exceeds the speed set for the mode switching level for a
speed reference (Pn181), the speed loop is changed to P control.
Pn10C
(210C
hex)
Mode Switching Level for Force Reference
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
0 to 800
1%
200
Immediately
Tuning
Pn181
(2181
hex)
Mode Switching Level for Speed Reference
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
0 to 10,000
1 mm/s
0
Immediately
Tuning
Pn182
(2182
hex)
Mode Switching Level for Acceleration
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
0 to 30,000
1 mm/s
2
0
Immediately
Tuning
Pn10F
(210F
hex)
Mode Switching Level for Position Deviation
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
0 to 10,000
1 reference unit
0
Immediately
Tuning
Speed
Position
Speed
Position
Speed
Position
Position
+Pn10C
- Pn10C
PI
P
P
Speed reference
Speed
Motor speed
Time
Torque reference
Torque reference 0
PI control
PI control
Pn10D
PI
Speed
Speed reference
Motor speed
Time
PI control
P control
Pn181
PI
Speed
Speed reference
P control
Motor speed
Time
PI control







































































