





























7.5 Procedure for Transferring User Constants
Group
SERVOPACK
Servomotor
Servomotor No.
(Cn-0037 Setting)
05
SGDB-05AN
SGMG-03ADB
ABH
SGMG-05ADA
8EH
SGMP-04A
7AH
SGM-04A
6AH
10
SGDB-10AN
SGMG-06ADB
ACH
SGMG-09ADA
8FH
SGMG-09ADB
ADH
SGMS-10ADA
A3H
SGMP-08A
7FH
SGM-08A
6BH
15
SGDB-15AN
SGMG-13ADA
9011
SGMG-12ADB
AFH
SGMS-15ADA
A4H
SGMP-15A
80H
20
SGDB-20AN
SGMG-20ADA
91H
SGMG-20ADB
AFH
SGMS-20ADA
A5H
30
SGDB-30AN
SGMG-30ADA
92H
SGMG-30ADB
BOH
SGMS-30ADA
A6H
SGMS-22ADA
9BH
50
SGDB-50AN
SGMG-44ADA
93H
SGMG-44ADB
B1H
SGMS-40ADA
A7H
SGMD-32ADA
9CH
SGMS-50ADA
A8H
SGMD-40ADA
9DH
7.5 Procedure for Transferring User Constants
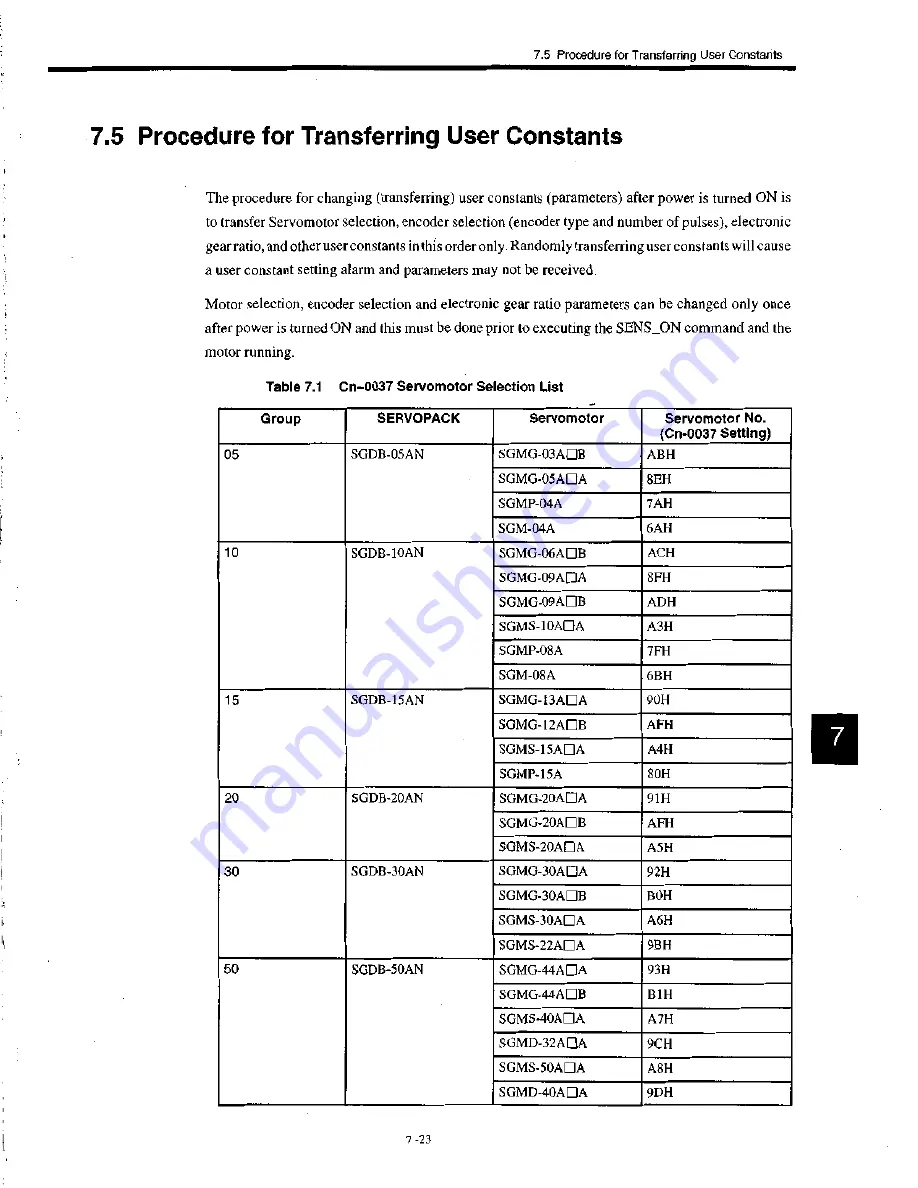
The procedure for changing (transferring) user constants (parameters) after power is turned ON is
to transfer Servomotor selection, encoder selection (encoder type and number of pulses), electronic
gear ratio, and other user constants in this order only. Randomly transferring user constants will cause
a user constant setting alarm and parameters may not be received.
Motor selection, encoder selection and electronic gear ratio parameters can be changed only once
after power is turned ON and this must be done prior to executing the SENS_ON command and the
motor running.
Table 7.1 C n - 0 0 3 7 Servomotor Selection List
7 -23







































































