





























4.4 Connecting an Incremental Encoder
Signal
Name
1CN pin No.
Description
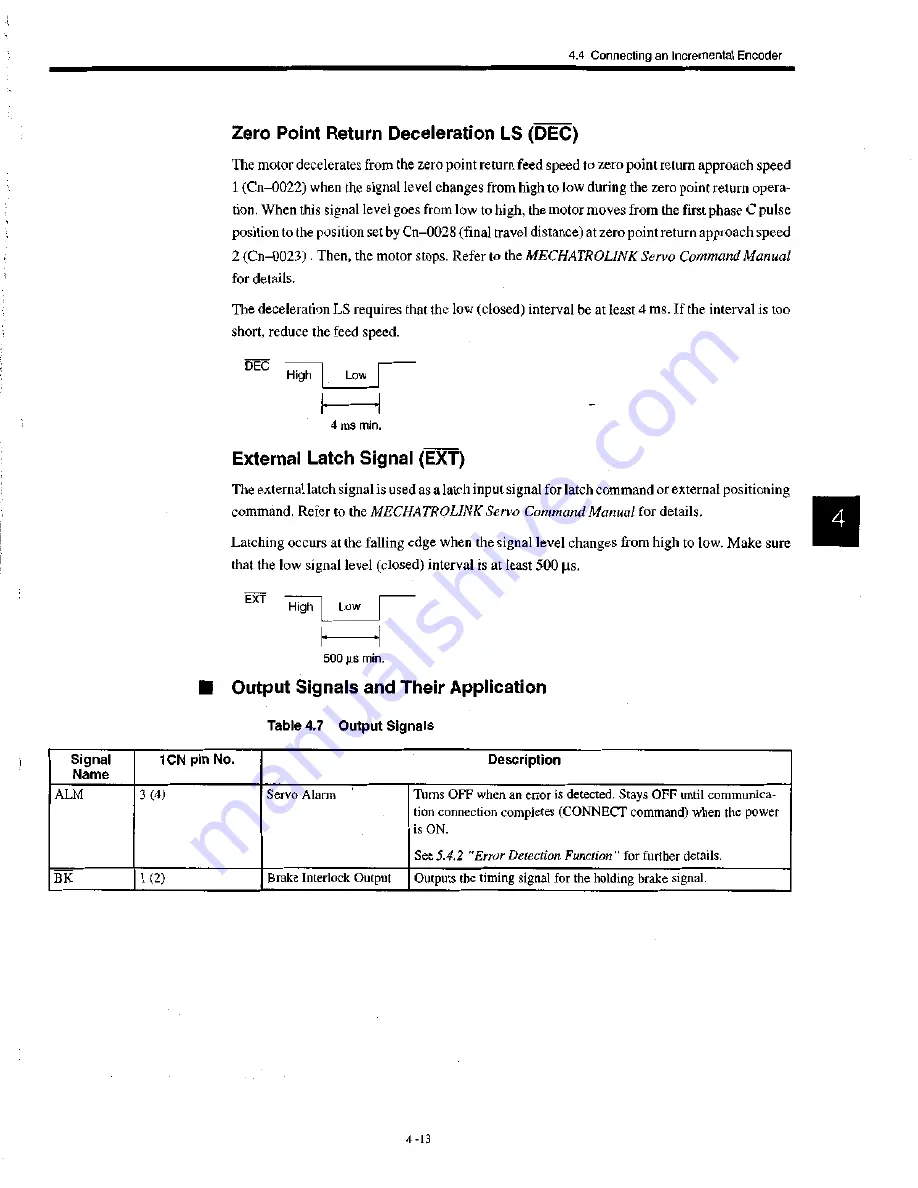
ALM
3 (4)
Servo Alarm
Turns OFF when an error is detected. Stays OFF until communica-
tion connection completes (CONNECT command) when the power
is ON.
See 5.4.2 "Error Detection Function" for further details.
BK
1 (2)
Brake Interlock Output
Outputs the timing signal for the holding brake signal.
Zero Point Return Deceleration LS (DEC)
The motor decelerates from the zero point return feed speed to zero point return approach speed
1 (Cn-0022) when the signal level changes from high to low during the zero point return opera-
tion. When this signal level goes from low to high, the motor moves from the first phase C pulse
position to the position set by Cn-0028 (final travel distance) at zero point return approach speed
2 (Cn-0023) . Then, the motor stops. Refer to the
MECHATROLINK Servo Command Manual
for details.
The deceleration LS requires that the low (closed) interval be at least 4 ms. If the interval is too
short, reduce the feed speed.
DEC
High
Low
4 ms min.
External Latch Signal (EXT)
The external latch signal is used as a latch input signal for latch command or external positioning
command. Refer to the
MECHATROLINK Servo Command Manual
for details.
Latching occurs at the falling edge when the signal level changes from high to low. Make sure
that the low signal level (closed) interval is at least 500 gs.
EXT H i g h
Low
500 [its min.
■
Output Signals and Their Application
Table 4.7 O u t p u t Signals
4 -13







































































