





























8.1 Trial Operation
8-11
8
(2) Operating Procedure in Speed Control Mode (Pn000 = n.
0
)
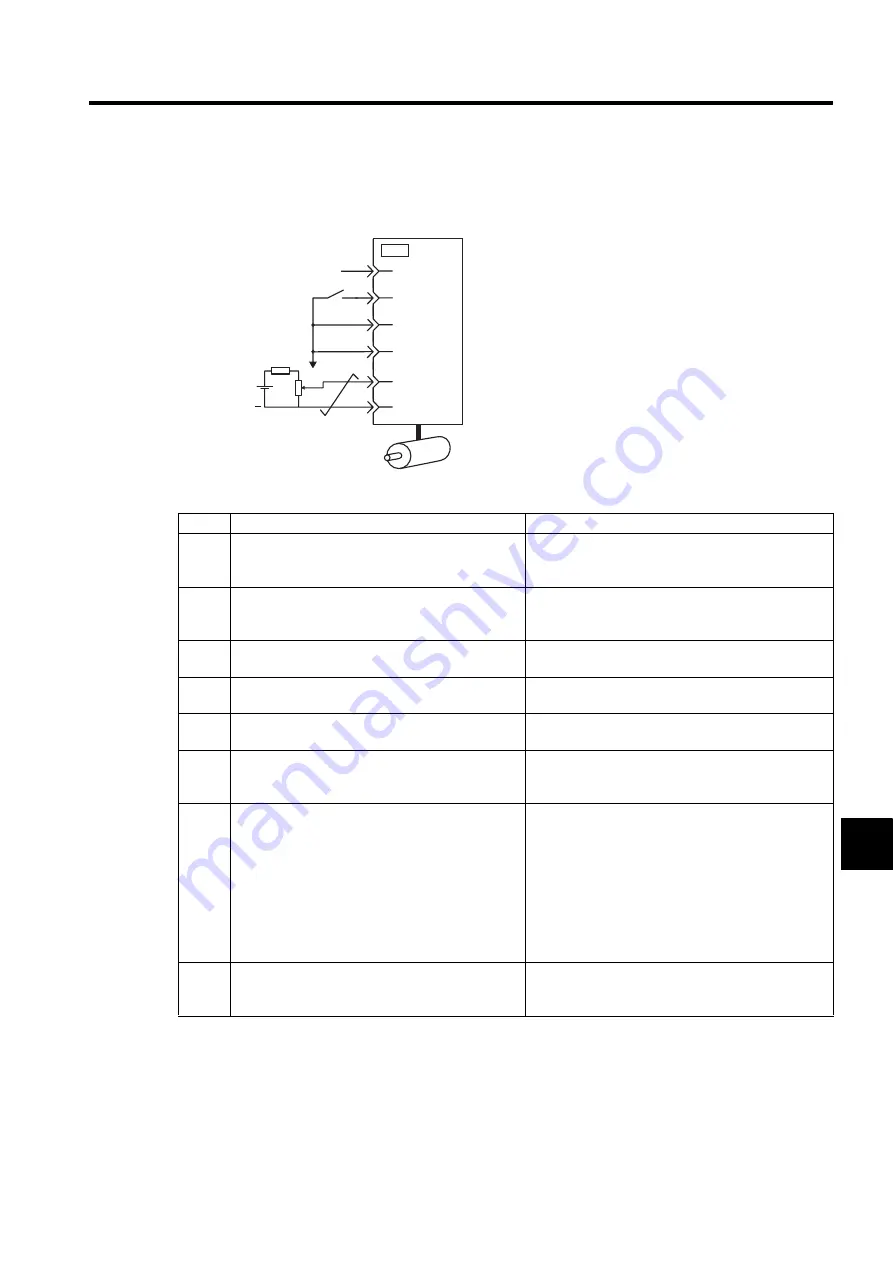
The following circuit is required: External input signal circuit or equivalent.
Step
Description
Check Method and Remarks
1
Check the power and input signal circuits again, and
check that the speed reference input (voltage
between the V-REF and SG) is 0 V.
Refer to the above figure for input signal circuit.
2
Turn ON the servo ON (/S-ON) input signal.
If the servomotor rotates at extremely slow speed,
refer to
8.5.3 Adjusting Offset
, and use the reference
voltage offset to keep the servomotor from moving.
3
Generally increase the speed reference input voltage
between V-REF and SG from 0 V.
The factory setting is 6 V/rated rotation speed.
4
Check the speed reference input to the SERVO-
PACK (Un000 [min-1]).
Refer to
7.1.3 Basic Mode Selection and Operation
for
how it is displayed.
5
Check the Un000 (motor speed [min-1].
Refer to
7.1.3 Basic Mode Selection and Operation
for
how it is displayed.
6
Check that the Un001 and Un000 values in steps 4
and 5 are equal.
Change the speed reference input voltage and check
that Un001 and Un000 values are equal for multiple
speed references.
7
Check the speed reference input gain and motor
rotation direction.
Refer to the following equation to change the Pn300
(speed reference input gain).
Un001=(voltage between V-REF) [V] × Pn300 [300
min-1/6V]
To change the motor rotation direction without chang-
ing polarity for speed reference input gain, refer to
8.3.2 Switching the Servomotor Rotation Direction
.
Perform the operation from step 2 again after the
motor rotation direction is changed.
8
When the speed reference input is set to 0 V and
servo OFF status enters, the trial operation for ser-
vomotor without load is completed.
−
47
CN1
+24V
/S-ON
P-OT
N-OT
V-REF
40
42
43
5
6
SERVOPACK
0V
+
V
E
V
E
: Max. voltage (12 V)
Summary of Contents for SGDH
Page 435: ...8 3 8...







































































