


























5.2 Servomotor and SERVOPACK Main Circuit Wire Size and Connectors
5-7
5
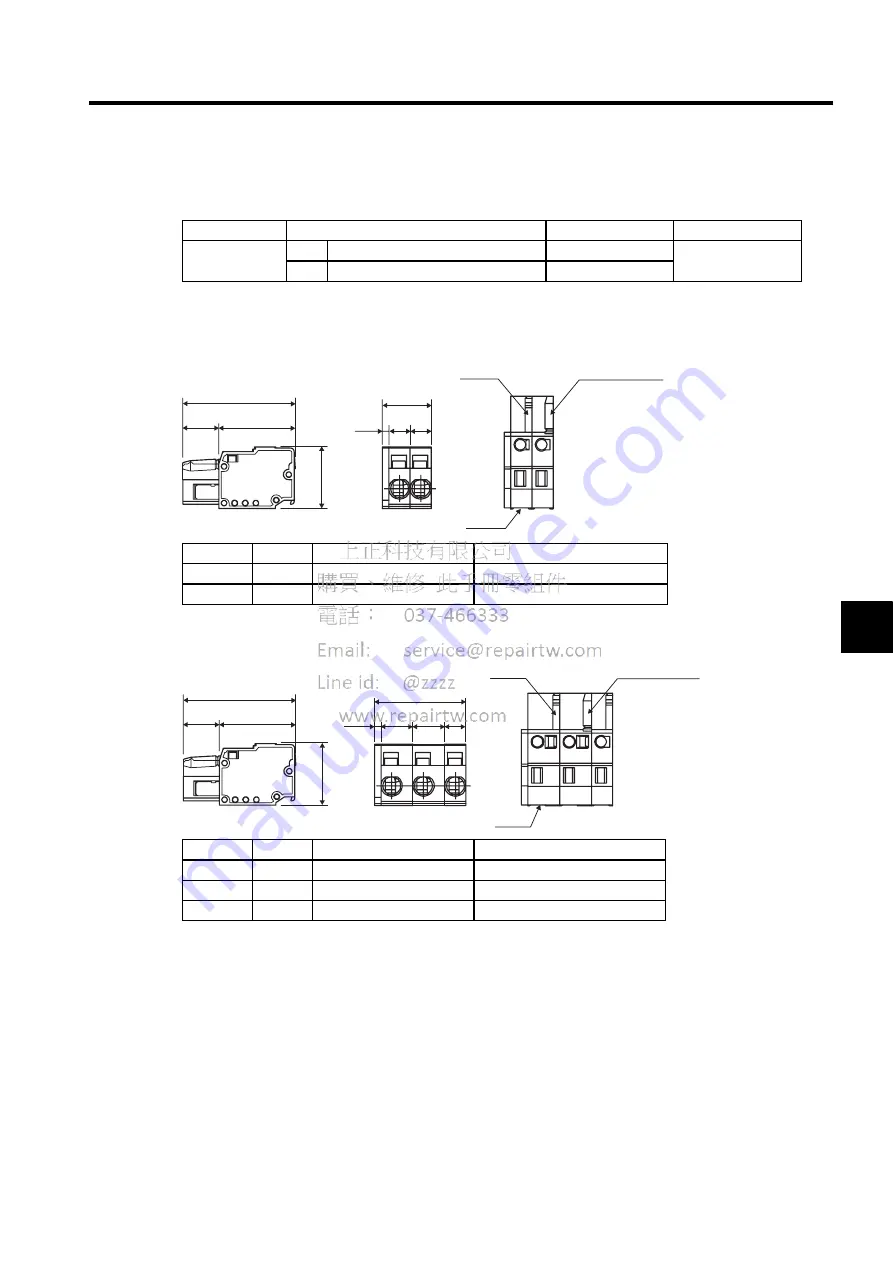
(3) SERVOPACK Power Supply Input Connector Kit
(a) Type
(b) Dimensional Drawings and Connector Pin Arrangement
• CN7 (Control power input connector)
Connector with cage: 721-102/026-000 (WAGO Company of Japan Ltd.)
• CN9 (Main circuit power input connector)
Connector with cage: 721-203/026-000 (WAGO Company of Japan Ltd.)
Type
Attached Connector
Connector Type
Manufacturer
JZSP-CJG9-2
CN7
Control power input connector
721-102/026-000
WAGO Company of
Japan Ltd.
CN9
Main circuit power input connector
721-203/026-000
Pin No.
Signal
Terminal Name
Item
1
C1
Control power input (+)
24/48 VDC terminal
2
C2
Control power input (
−
)
DC ground terminal
Pin No.
Signal
Terminal Name
Item
1
C1
Control power input (+)
24/48 VDC terminal
2
C2
Control power input (
−
)
DC ground terminal
3
FG/G
Ground terminal
Motor ground terminal
1.5
(0.06)
5
(0.20)
5
(0.20)
11.5 (0.45)
Units: mm (in)
1-pin
Latch
Coding finger
8.5
(0.33)
18 (0.71)
26.5 (1.04)
14.5 (0.57)
7.5
(0.30)
7.5
(0.30)
1.5
(0.06)
5
(0.20)
21.5 (0.85)
Units: mm (in)
1-pin
Latch
Coding finger
8.5
(0.33)
18 (0.71)
26.5 (1.04)
14.5 (0.57)
Summary of Contents for SGDJ Series
Page 19: ...xix INDEX Revision History ...
Page 34: ...2 Selections 2 8 2 4 Selecting Cables CN4 c d e FG ...
Page 176: ...8 3 8 ...