





























8 Operation
8-4
8.1 Trial Operation
Make sure that all wiring has been completed prior to trial operation.
Perform the following three types of trial operation in order. Instructions are given for SGDJ-
S speed con-
trol mode and SGDJ-
P position control mode. Unless otherwise specified, the standard parameters for
speed control mode (factory setting) are used.
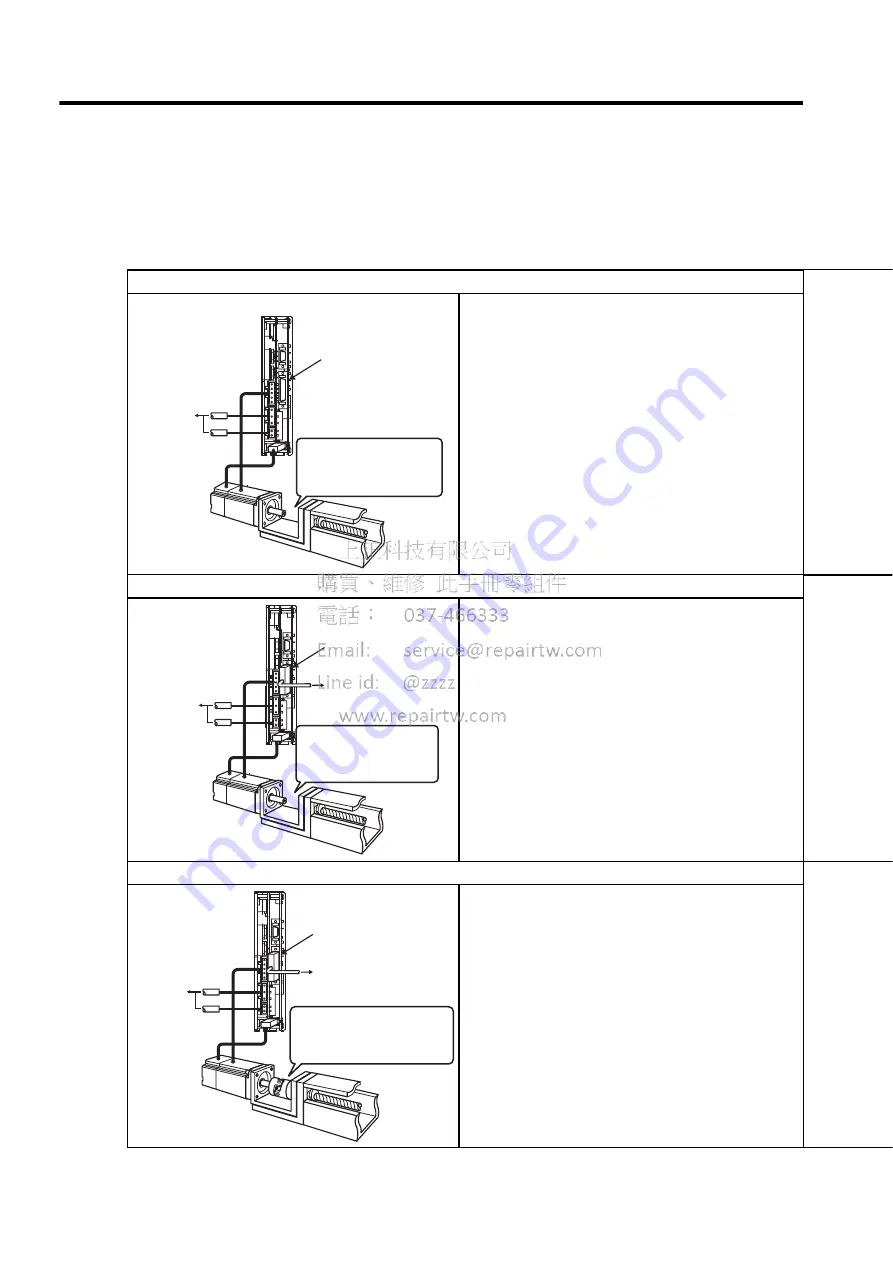
(1)Trial Operation for Servomotor without Load (Refer to 8.1.1.)
Purpose
The servomotor is operated without connecting the shaft to
the machine in order to confirm that the following wiring is
correct.
• Power supply circuit wiring
• Motor wiring
• Encoder wiring
• Motor’s rotation direction and motor speed
(2)Trial Operation for Servomotor with Host Reference (Refer to 8.1.2.)
Purpose
The servomotor is operated without connecting the shaft to
the machine in order to confirm that the following wiring is
correct.
• I/O signal wiring between the SERVOPACK and the host
controller.
• Motor’s rotation direction, motor speed, and number of
rotations
• Check the operation of the brake, overtravel, and other pro-
tective functions.
(3)Trial Operation for the Servomotor and Machine Combined (Refer to 8.1.3.)
Purpose
The servomotor is connected to the machine and trial opera-
tion is performed. The SERVOPACK is adjusted to match the
machine characteristics.
• The servomotor’s rotation direction, motor speed, and
machine travel distance.
• Set the necessary parameters.
To power
supply
Secure the motor flange to
the machine, but do not
connect the motor shaft to
the load shaft.
CN1
Secure the motor flange to
the machine, but do not
connect the motor shaft to
the load shaft.
To power
supply
CN1
To host controller
Secure the motor flange to the
machine, and use a coupling to
connect the motor shaft to the
load shaft.
To host controller
To power
supply
CN1
Summary of Contents for SGDJ Series
Page 19: ...xix INDEX Revision History ...
Page 34: ...2 Selections 2 8 2 4 Selecting Cables CN4 c d e FG ...
Page 176: ...8 3 8 ...







































































