





























8.1 Trial Operation
8-5
8
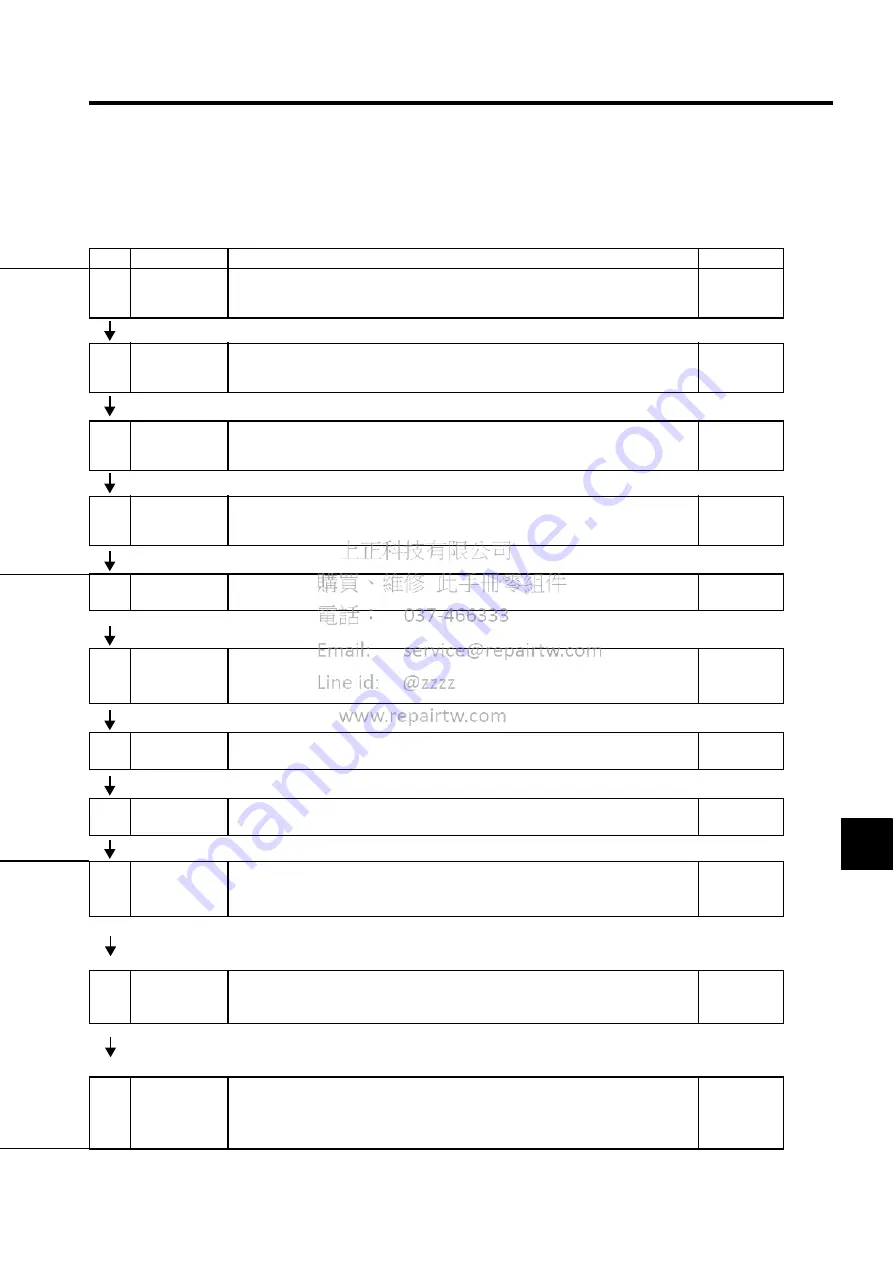
Step
Item
Description
Reference
1
Installation
and mounting
Install the servomotor and SERVOPACK according to the installation conditions.
(Do not connect the servomotor to the machine because the servomotor will be oper-
ated first under a no-load condition for checking.)
−
2
Wiring and
connections
Connect the power supply circuit (L1 or L2), servomotor wiring (U, V, W), I/O sig-
nal wiring (CN1), and encoder wiring (CN4). During
(1) Trial Operation for Servo-
motor without Load
, however, disconnect the CN1 connector.
−
3
Turn ON the
power.
Turn ON the power. Check the panel operator to make sure that the SERVOPACK is
running normally. If using a servomotor equipped with an absolute encoder, perform
the setup for the absolute encoder. (Refer to
8.4.5 Absolute Encoder Setup (Fn008)
.)
−
4
Execute jog
mode
operation.
Execute jog mode operation with the servomotor alone under a no-load condition.
Jog Operation
5
Connect input
signals.
Connect the input signals (CN1) necessary for trial operation.
−
6
Check input
signals.
Use the internal monitor function to check the input signals.
Turn ON the power, and check the emergency stop, brake, overtravel, and other pro-
tective functions for correct operation.
−
7
Input the ser-
vo ON signal.
Input the servo ON signal, and turn ON the servomotor.
Host
Reference
8
Input
reference.
Input the reference for the control mode being used, and check the servomotor for
correct operation.
Host
Reference
9
Check protec-
tive operation.
Turn OFF the power, and then connect the servomotor to the machine.
If using a servomotor with an absolute encoder, set up the absolute encoder and make
the initial settings for the host controller to match the machine’s zero position.
−
10
Set
necessary
parameters.
Using the same procedure as you did to input a reference in step 8, operate the servo-
motor from the host controller and set the parameter so that the machine’s travel
direction, travel distance, and travel speed all correspond to the reference.
Host
Reference
11
Operation
The servomotor can now be operated. Adjust the servo gain if necessary. Refer to
9.1 Autotuning
.
If a problem occurs, refer to
Chapter 10 Inspection, Maintenance, and Troubleshoot-
ing
.
Host
Reference
Summary of Contents for SGDJ Series
Page 19: ...xix INDEX Revision History ...
Page 34: ...2 Selections 2 8 2 4 Selecting Cables CN4 c d e FG ...
Page 176: ...8 3 8 ...







































































