





























8.4 Absolute Encoders
8-35
8
8.4.7 Multiturn Limit Setting
The parameter for the multiturn limit setting sets the upper limit for the multiturn data from the encoder into
Pn002 = n
0
when using an absolute encoder. When the rotation amount exceeds this setting, the encoder
rotation amount returns to 0.
• Encoder Multiturn Limit Disagreement
If the Pn205 value is changed from the factory setting and the power is turned OFF then ON, an alarm will be dis-
played.
• The multiturn limit value must be changed only for special applications. Changing it inappropriately or unin-
tentionally can be dangerous.
• If the Multiturn Limit Disagreement alarm (A.CC) occurs, check the setting of parameter Pn205 to be sure
that it is correct.
If Fn013 is executed when an incorrect value is set in Pn205, an incorrect value will be set in the encoder. The alarm
will disappear even if an incorrect value is set, but incorrect positions will be detected, resulting a dangerous situation
where the machine will move to unexpected positions and machine break and personal accident will occur.
WARNING
Pn205
Multiturn Limit Setting
Setting Range
Setting Unit
Factory Setting
Setting Validation
0 to 65535
Rev
65535
After restart
This parameter is valid when Pn002 = n
0
(when the absolute encoder is used).
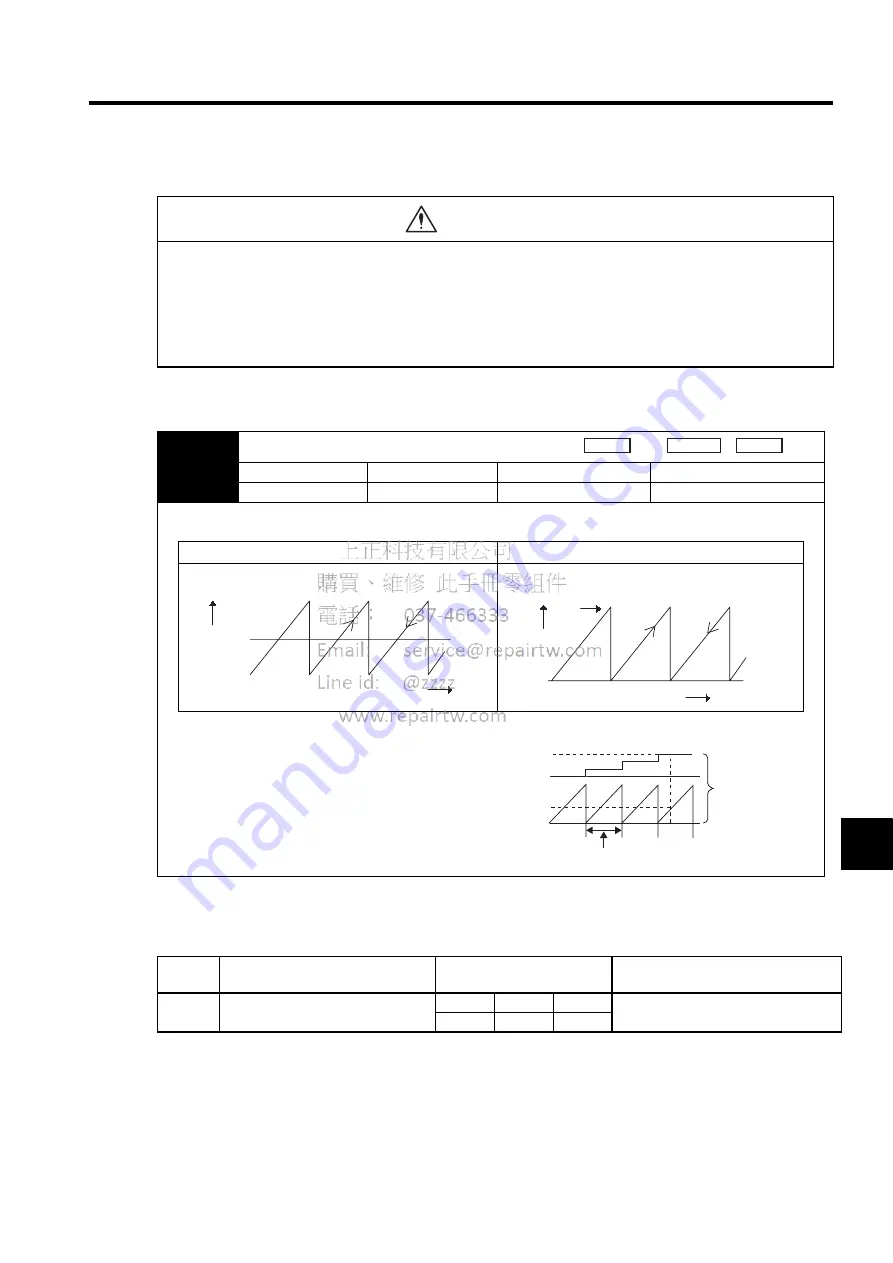
The range of the multiturn data will vary when this parameter is set to anything other than the factory setting.
Factory Setting (=65535)
Without Factory Setting (
≠
65535)
When Set to Anything Other than the Factory Setting
(
≠
65535)
When the motor rotates in the reverse direction with the multiturn
data at 0, the multiturn data will change to the setting of Pn205.
When the motor rotates in the forward direction with the multiturn
data at the Pn205 setting, the multiturn data will change to 0.
Set the Pn205 to (the desired multiturn data -1).
Speed
Position
Torque
+32767
-32768 No. of revolutions
Multiturn
data
0
Reverse
direction
Forward
direction
0
Pn205 setting value
Reverse
direction
No. of revolutions
Forward
direction
Multiturn
data
Position
(Absolute encoder)
Travel distance/motor = 1 revolution
(Revolution counter)
Position detection
Detection amount
Alarm
Display
Alarm Name
Alarm Code Outputs
Meaning
A.CC
Multiturn Limit Disagreement
ALO1
ALO2
ALO3
Different multiturn limits have been set
in the encoder and SERVOPACK.
ON (L)
OFF (H)
ON (L)
Summary of Contents for SGDJ Series
Page 19: ...xix INDEX Revision History ...
Page 34: ...2 Selections 2 8 2 4 Selecting Cables CN4 c d e FG ...
Page 176: ...8 3 8 ...







































































