





















3.4 Terms and Data for Servomotors With Gears
3-17
3
3.4 Terms and Data for Servomotors With Gears
(1) Terms for Servomotors With Standard Backlash Gears and Low-backlash Gears
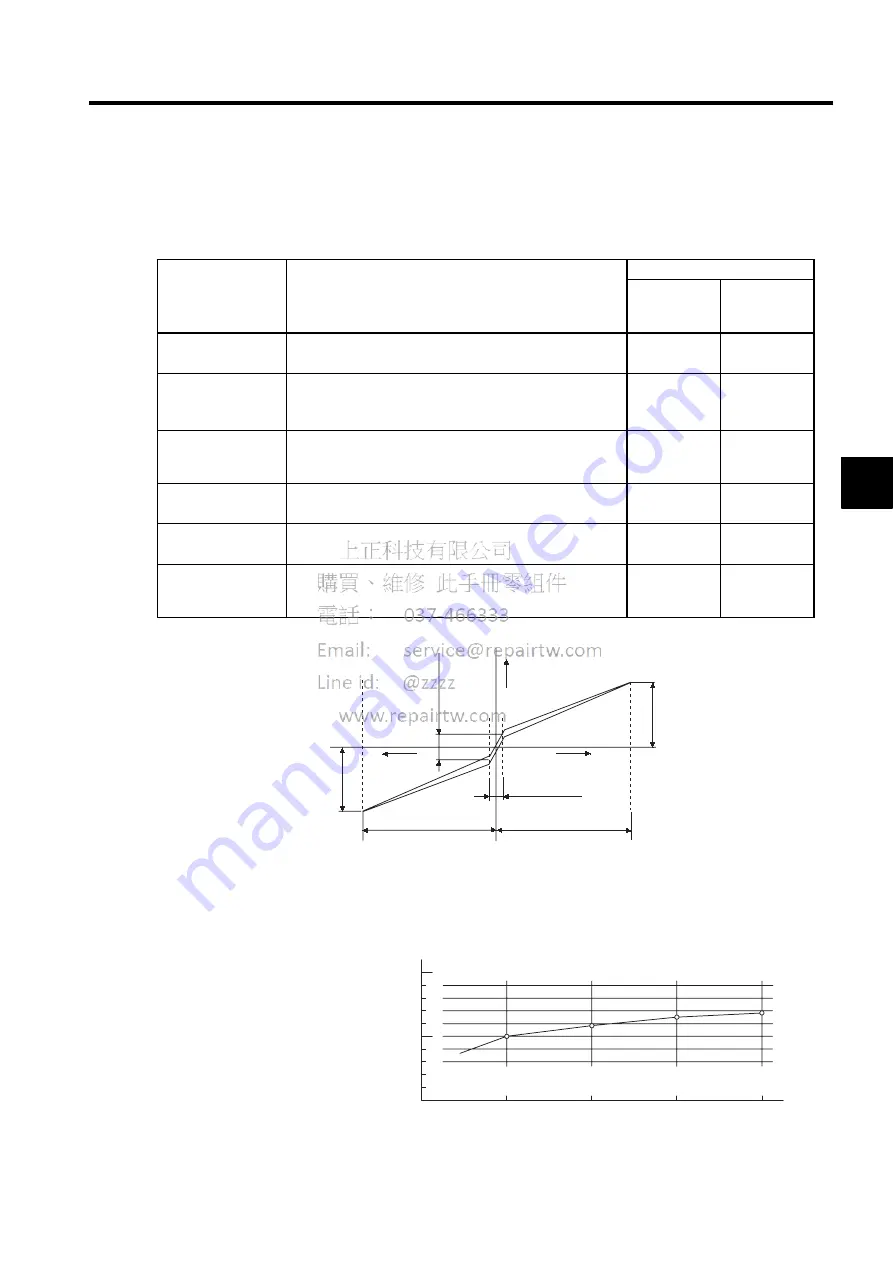
* See the following graph for lost motion and torsion rigidity.
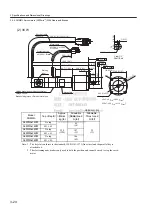
(2) Noise Data
The following noise data for a servomotor with a gear is for reference only and may slightly vary with the capac-
ity and gear ratio of the servomotor.
Terminology for Servomotors with Gears
Item
Measurement Method/Definition
Typical Value
Standard
Backlash
Gears
Low-back-
lash Gears
Rated Input Motor
Speed (min
-1
)
−
3000
3000
Max. Allowable
Input Motor Speed
(min
-1
)
−
4000
4000
Rated Torque
(N
x
m)
The rated output torque of the motor is the gear input torque.
The rated torque is this value multiplied by the inverse of the
gear ratio and efficiency.
−
−
Lost Motion
(arc-min)
∗
Angular difference in the screw with a
±
5% rated torque
load. (Maximum value at any four positions during output.)
15 max.
3 max.
Torsion Rigidity
(arc-min)
∗
Highest torsion angle value on one side with a
±
rated torque
load
22 max.
10 max.
Angular Transmis-
sion Error Accuracy
(arc-min)
Difference in absolute accuracy for one rotation under load
and no-load conditions during output.
10 max.
6 max.
Lost
motion
Torsion
rigidity
Torsion
rigidity
Torsion
rigidity
- Torque
+ Torque
Rated torque
Rated torque
±
5% Rated torque
Measurement Conditions:
• Scale A: 50 cm (19.7 in)
• Ground Noise: 28 dB
1000
2000
3000
4000
50
100
Input speed (min )
-1
Initial Noise
Level (dB)
Summary of Contents for SGDJ Series
Page 19: ...xix INDEX Revision History ...
Page 34: ...2 Selections 2 8 2 4 Selecting Cables CN4 c d e FG ...
Page 176: ...8 3 8 ...







































































