

























10.1 List of Parameters
10-23
10
Ap
pend
ix
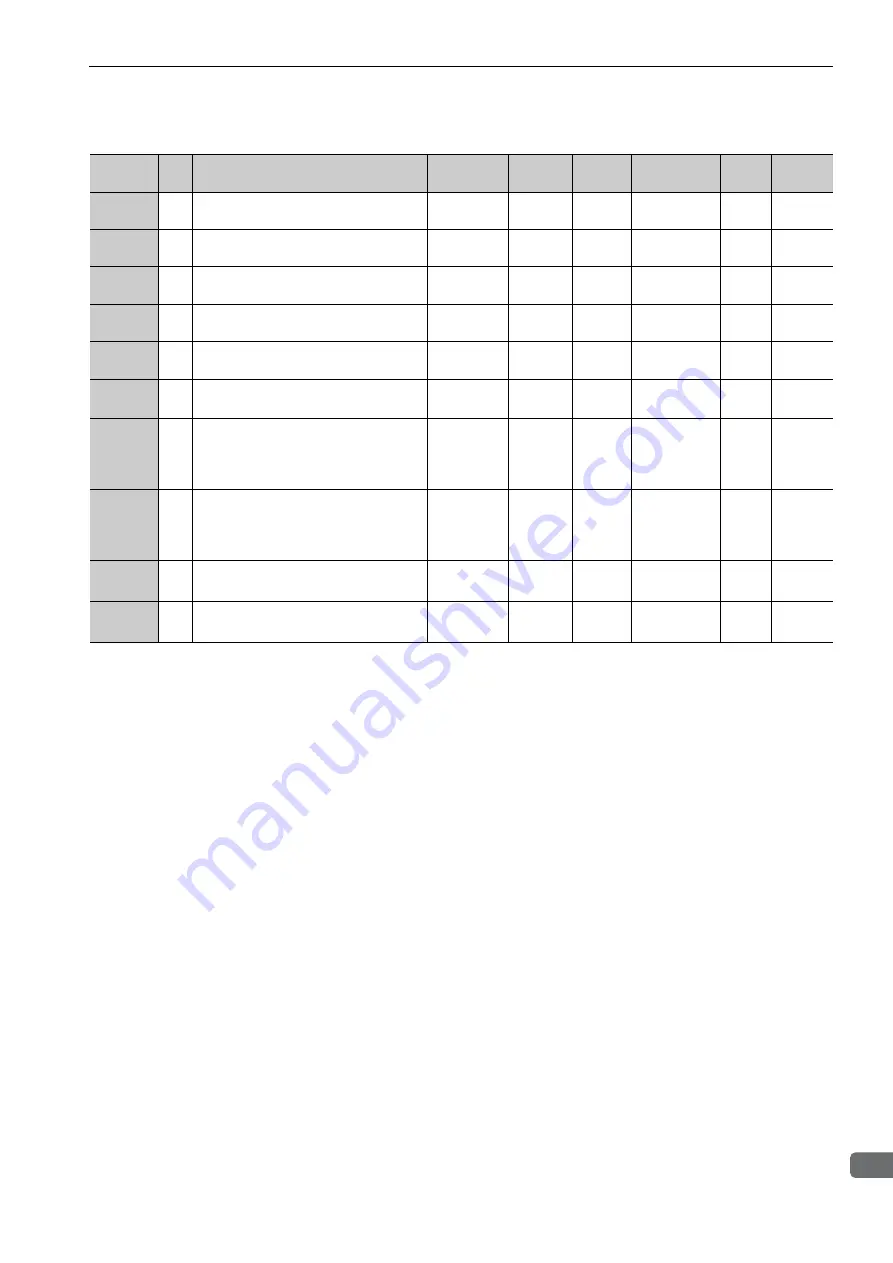
Pn550
2
Analog Monitor 1 Offset Voltage
-10000 to
10000
0.1 V
0
Immediately
Setup
5.1.3
Pn551
2
Analog Monitor 2 Offset Voltage
-10000 to
10000
0.1 V
0
Immediately
Setup
5.1.3
Pn552
2
Analog Monitor
Magnification (
×
1)
-10000 to
10000
×
0.01
100
Immediately
Setup
5.1.3
Pn553
2
Analog Monitor
Magnification (
×
2)
-10000 to
10000
×
0.01
100
Immediately
Setup
5.1.3
Pn560
2
Remained Vibration
Detection Width
1 to 3000
0.1%
400
Immediately
Setup
5.7.1
Pn561
2
Overshoot Detection Level
0 to 100
1%
100
Immediately
Setup
5.3.1
5.4.1
Pn600
2
Regenerative Resistor Capacity
*2
Depends on
SERVO-
PACK
Capacity
*3
10 W
0
Immediately
Setup
3.8.3
Pn601
2
Dynamic Brake Resistor Capacity
0 or higher
(Max. value
depends on
model.)
*3
10 W
0
Immediately
Setup
3.9.2
Pn621 to
Pn628
*4
–
SERVOPACK: Safety Module Parame-
ters
–
–
–
–
–
–
Pn800 to
Pn95F
*5
2
Reserved (Do not change.)
–
–
0
–
–
–
∗2.
Normally set to "0." When using an external regenerative resistor, set the capacity (W) of the regenerative resistor
unit.
∗3.
The upper limit is the maximum output capacity (W) of the SERVOPACK.
∗4.
These parameters can be set in SERVOPACKs with safety modules. For details, refer to
Σ
-V Series User’s Manual,
Safety Module
(No.: SIEP C720829 06).
∗5.
For details on Pn800 to Pn95F, refer to the manual of the connected command option module.
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Reference
Section







































































