





























471
For Position Control
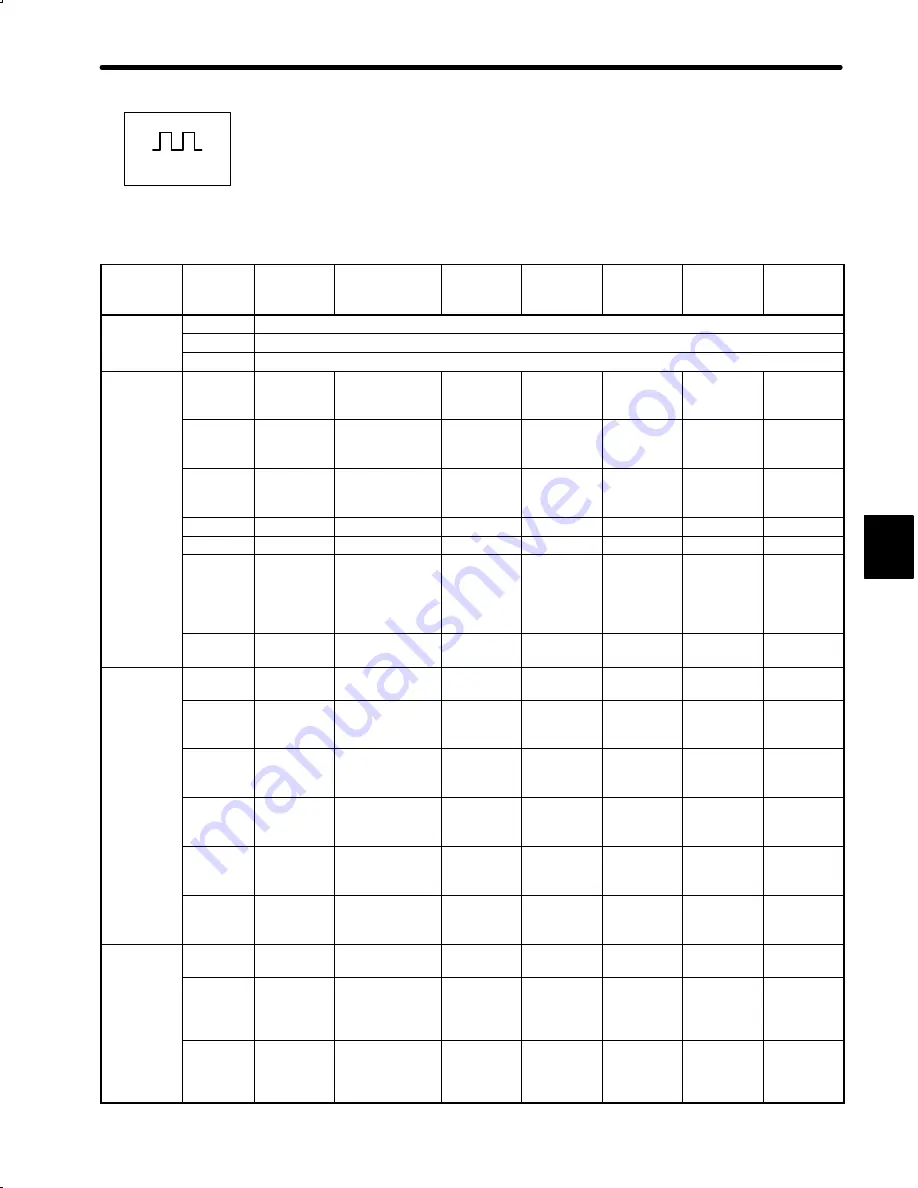
List of User Constants (User Constant Setting)
Category
User
Constant
No.
Code
Name
Unit
Lower
Limit
Upper
Limit
Factory
Setting
Remarks
Cn-00
Not a user constant. (Cn-00 is used to select special mode for digital operator.)
See 4.1.3.
Cn-01
Memory switch (see on page 474.)
See note 1
Cn-02
Memory switch (see on page 476.)
See note 1
Gain
Related
Constants
Cn-04
LOOPHS
Speed loop
gain
Hz
1
2000
80
See note 2
See 3.6.1,
3.6.2.
Cn-05
PITIME
Speed loop
integration time
constant
0.01ms
2
10000
2000
See note 2
See 3.6.1,
3.6.2.
Cn-1A
POSGN
Position loop
gain
1/s
1
500
40
See note 2
See 3.6.1,
3.6.2.
Cn-1C
BIASLV
Bias
r/min
0
450
0
See 3.6.5.
Cn-1D
FFGN
Feed-forward
%
0
100
0
See 3.6.3.
Cn-26
ACCTME
Position
reference
acceleration/de
celeration time
constant
100
µ
s
0
640
0
See 3.5.2.
Cn-27
FFFILT
Feed-forward
reference filter
100
µ
s
0
640
0
See 3.6.3.
Torque
Related
Cn-06
EMGTRQ
Emergency
stop torque
%
0
Max.
torque
Max.
torque
See 3.1.2.
e a ed
Constants
Cn-08
TLMTF
Forward
rotation torque
limit
%
0
Max.
torque
Max.
torque
See 3.1.3.
Cn-09
TLMTR
Reverse
rotation torque
limit
%
0
Max.
torque
Max.
torque
See 3.1.3.
Cn-17
TRQFIL
Torque
reference filter
time constant
100
µ
s
0
250
4
See 3.5.5.
Cn-18
CLMIF
Forward
external torque
limit
%
0
Max.
torque
100
See 3.1.3.
Cn-19
CLMIR
Reverse
external torque
limit
%
0
Max.
torque
100
See 3.1.3.
Sequence
Related
Cn-0B
TGONLV
Zero-speed
level
r/min
1
4500
20
See 3.7.5.
e a ed
Constants
Cn-12
BRKTIM
Time delay
from brake
reference until
servo OFF
10 ms
0
50
0
See 3.4.4.
Cn-15
BRKSPD
Speed level for
brake reference
output during
motor operation
r/min
0
4500
100
See 3.4.4.
D
Positions







































































