



















4.5 FT83 SERVOPACKs with Analog Voltage/Pulse Train References
4-172
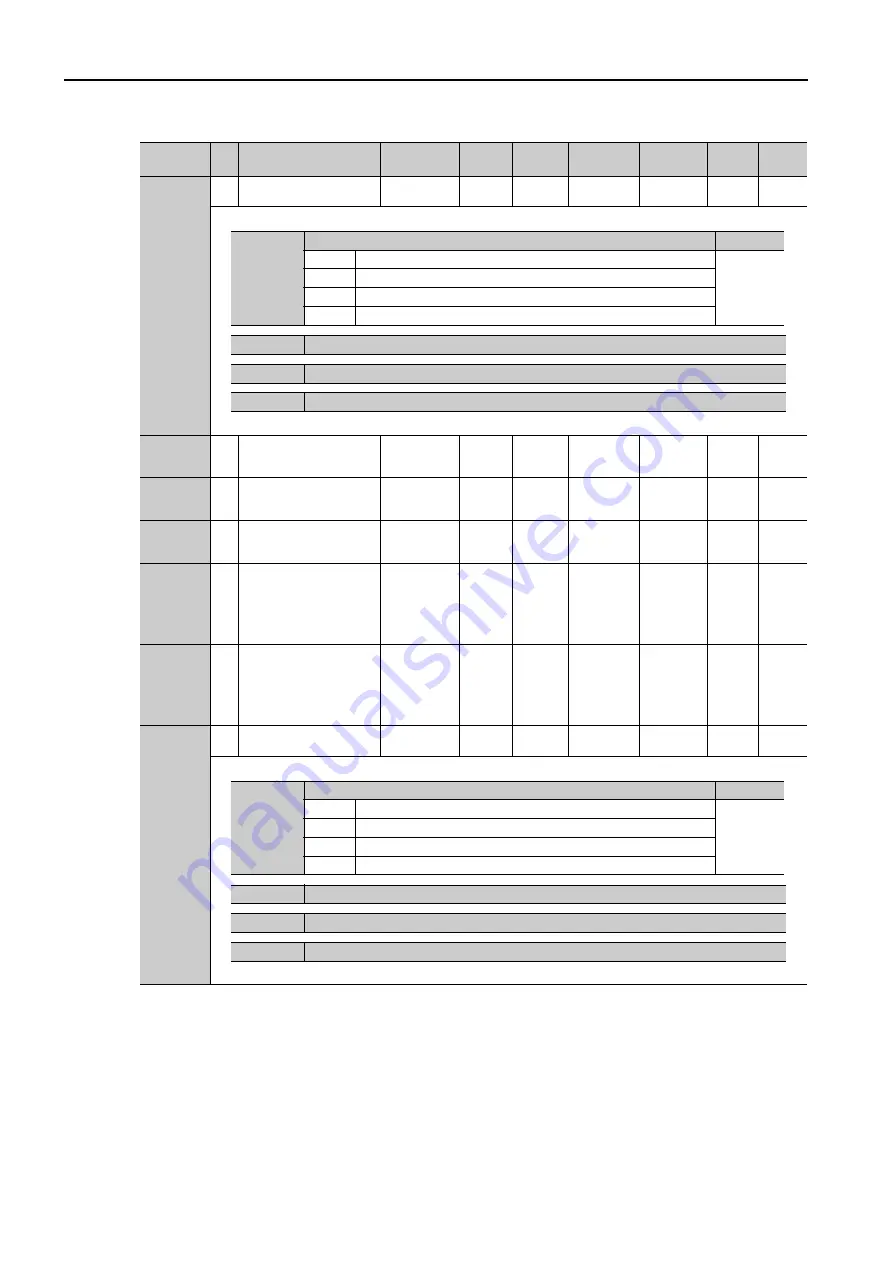
Pn637
2
Moving Mode
0000h to
0003h
–
0000h
All
After
restart
Setup
−
Pn638
4
Forward Software Limit
(P-LS)/End Point of
Rotational Coordinates
-536,870,911
to
+536,870,911
Refer-
ence
units
+536,870,911
All
After
restart
Setup
*1
Pn63A
4
Reverse Software Limit
(N-LS)/Starting Point of
Rotational Coordinates
-536,870,911
to
+536,870,911
Refer-
ence
units
-536,870,911
All
After
restart
Setup
*1
Pn63C
4
Origin Position/Abso-
lute Encoder Offset
-1,073,741,823
to
+1,073,741,823
Refer-
ence
units
0
All
After
restart
Setup
*1
Pn63E
4
Acceleration Rate
1 to
199,999,999
1,000
(refer-
ence
units
/min
-1
)
/ms
1000
All
Immedi-
ately
Setup
*1
Pn640
4
Deceleration Rate
1 to
199,999,999
1,000
(refer-
ence
units
/min
-1
)
/ms
1000
All
Immedi-
ately
Setup
*1
Pn642
2
Origin Return Method
0000h to
0003h
–
0000h
All
After
restart
–
–
Continued on next page.
Continued from previous page.
Parameter
No.
Siz
e
Name
Setting
Range
Setting
Unit
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
Refer-
ence
n.
X
Moving Mode
Reference
0
Use linear coordinates.
*1
1
Use rotational coordinates. Use the shortest path.
2
Use rotational coordinates. Always move forward.
3
Use rotational coordinates. Always move in reverse.
n.
X
Reserved parameter (Do not change.)
n.
X
Reserved parameter (Do not change.)
n.X
Reserved parameter (Do not change.)
n.
X
Origin Return Method
Reference
0
Origin returns are not executed.
*1
1
Use the /DEC signal and phase C for origin returns.
2
Use the /DEC signal for origin returns.
3
Use phase C for origin returns.
n.
X
Reserved parameter (Do not change.)
n.
X
Reserved parameter (Do not change.)
n.X
Reserved parameter (Do not change.)







































































