





























24
YASKAWA
SIEP C730600 88F MECHATROLINK-III Technical Manual
◆
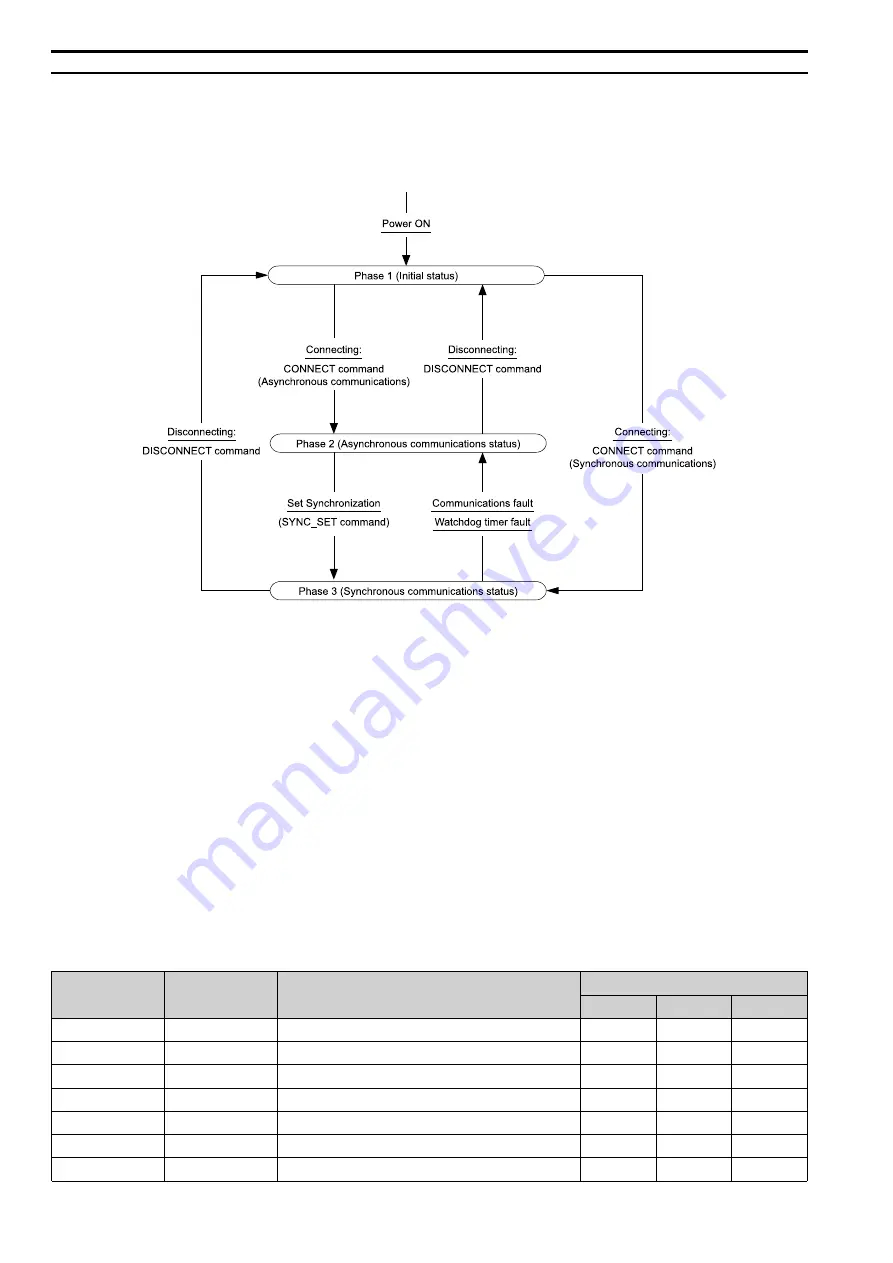
Communication Phases
The SI-ET3 option changes status after receiving a command code or fault from the master as shown in the
following figure.
The communication phases determine the available commands. Refer to
and
for more
information.
Figure 7.1 Communication Phases
■
Phase 1: Initial status after power ON
Operation proceeds with a default transmission cycle of 2 ms. The transmission cycle is changed to the time
indicated in the synchronous frame when a CONNECT command is received from the master. Then the phase
moves to phase 2 or phase 3 after a response to the CONNECT command is returned.
Even if a transfer fault is detected in phase 1, no fault notification is provided.
■
Phase 2: Asynchronous communications
All SI-ET3 commands can be used. Phase 2 starts to count the watchdog timer in the communications frame The
phase moves to phase 3 when a SYNC_SET command is received, and it moves to phase 1 when a
DISCONNECT command is received.
■
Phase 3: Synchronous communications
Watchdog timer faults in the communications frame are detected. The phase moves to phase 1 if the
DISCONNECT command is received. The phase moves to phase 2 if a reception fault or a watchdog timer fault is
detected.
Table 7.2 Main Command Communication Phases
Command
Code
(Hex.)
Contents
Communication Phases
1
2
3
NOP
00
No Operation Command
-
○
○
PRM_RD
01
Read Parameter Command
-
○
○
PRM_WR
02
Write Parameter Command
-
○
○
ID_RD
03
Read ID Number Command
-
○
○
CONFIG
04
Setup Device Command
-
○
○
ALM_RD
05
Read Alarm and Warning Command
-
○
○
ALM_CLR
06
Clear Alarm and Warning Command
-
○
○







































































