





















5.3 External Dimensions
5.3.5 SGLTW-50: High-efficiency Models
5
S
pecification
s
, Rating
s
, and Exter
nal Dimen
s
ion
s
of
SG
LT
S
ervomotor
s
5-21
5.3.5
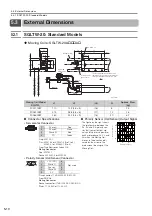
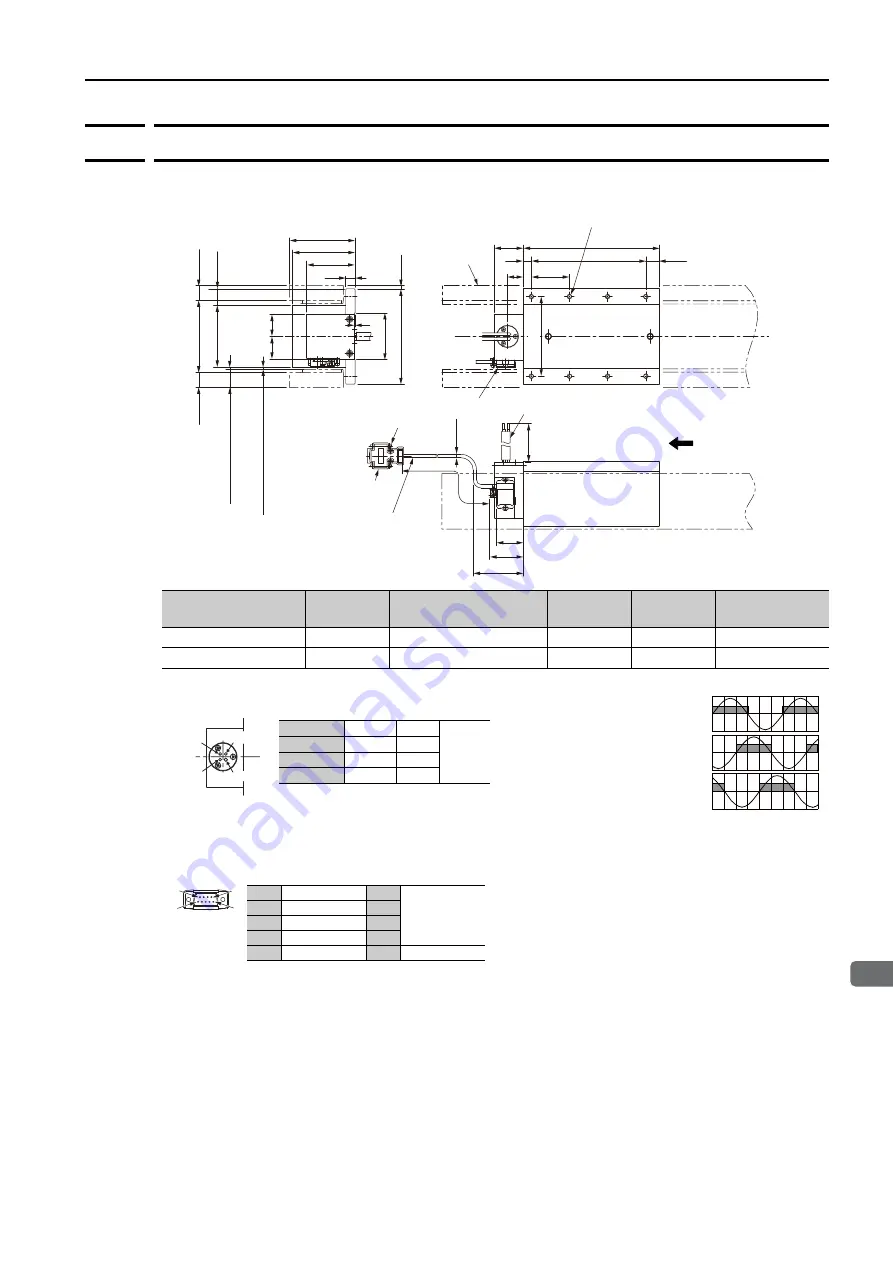
SGLTW-50: High-efficiency Models
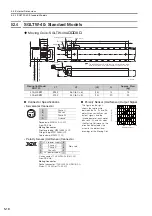
Moving Coils: SGLTW-50A
H
Moving Coil Model
SGLTW-
L1
L2
(L3)
N
Approx. Mass
[kg]
50A170H
170
144 (48
×
3)
(16)
8
6
50A320H
315
288 (48
×
6)
(17)
14
11
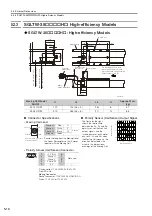
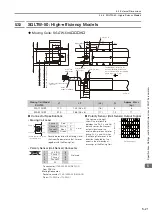
Connector Specifications
Polarity Sensor (Hall Sensor) Output Signal
•
Moving Coil Lead
The figure on the right
shows the relationship
between the Su, Sv, and Sw
polarity sensor (hall sensor)
output signals and the
inverse power of each motor
phase Vu, Vv, and Vw when
the Moving Coil moves in the
direction indicated by the
arrow in the dimensional
drawings of the Moving Coil.
Secure the lead from the Moving Coil of
the Linear Servomotor so that it moves
together with the Moving Coil.
•
Polarity Sensor (Hall Sensor) Connector
Pin connector: 17JE-23090-02 (D8C)-CG
From DDK Ltd.
Mating Connector
Socket connector: 17JE-13090-02 (D8C)A-CG
Studs: 17L-002C or 17L-002C1
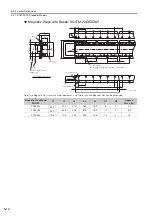
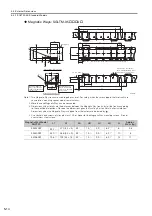
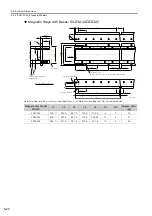
Magnetic Way
2
#4-40
UNC screws
Polarity sensor (hall sensor)
connector
Cable
UL20276, AWG28
(4.2 dia.)
Polarity sensor
(hall sensor)
Protective tube
Unit: mm
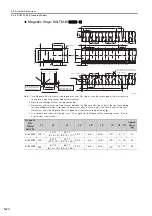
The Moving Coil moves in the
direction indicated by the arrow
when current flows in the following
phase sequence: U, V, W.
(Gap: 1.0 without magnet cover)
(Gap: 0.8 with magnet cover)
(23.1 without magnet cover)
(23.3 with magnet cover)
28
30
1
(4.1)
(90)
(85)
(19.1)
80
±
0.05
120
±
0.1
500
±
50
35
43
63 min.
20
±
0.1
500
±
50
100
±
0.15
(L3)
48
±
0.15
20
10
30
L1
N
×
M6
×
12
L2
(19.1)
12
60
81
62.5
Vu
Vv
Vw
Su
Sv
Sw
0
180
360
540
Inverse power (V)
Electrical angle (
°
)
Phase V
Phase U
Ground
Phase W
(Viewed from the top surface
of the Moving Coil.)
Phase U
Red
U
2 mm
2
Phase V
White
V
Phase W
Black
W
Ground
Green
−
9
6
5
1
1
+5 V (DC)
6
Not used
2
Phase U
7
3
Phase V
8
4
Phase W
9
5
0 V
−
−







































































