




























4.2 Setup Procedure
4.2.4 Setting the Moving Method of the Rotational Coordinate System
4
Rotational Coor
dinate
S
y
s
tem
4-5
•
If the offset is greater than the setting of Pn87A (Last Rotational Coordinate): Pn808 = Offset
−
(Pn87A
−
Pn87C + 1)
•
If the offset is between Pn87C and Pn87A, inclusive: Pn808 = Offset
If the settings of the parameters are not in the correct relationship (i.e., Pn87C
≤
Pn808
≤
Pn87A), an A.04A alarm (Parameter Setting Error 2) will occur.
Refer to the following section for details on the A.04A alarm.
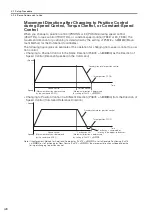
If the encoder position (X) is at the origin of the machine coordinate system (0), then set Pn808
to -X.
*
Send the Turn Sensor ON command (SENS_ON) from the host controller to enable changes to the settings.
4.2.4
Setting the Moving Method of the Rotational Coordinate
System
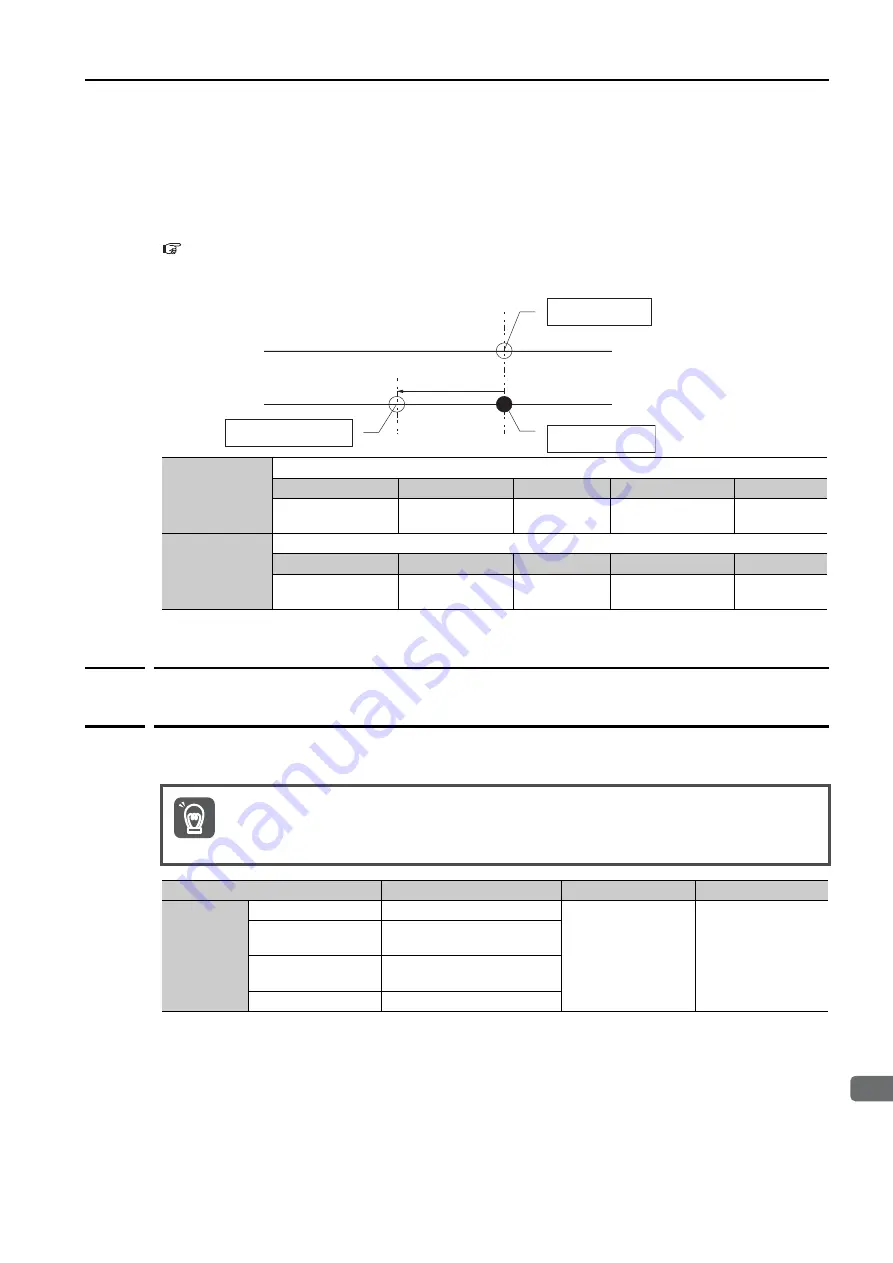
Set Pn87E = n.
X (Movement Method for Rotational Coordinates) to specify movement in
the rotational coordinate system.
Note: This parameter is enabled when Pn87A or Pn87C is not set to 0.
Pn808
Absolute Encoder Origin Offset
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
-1,073,741,823 to
1,073,741,823
1 reference unit
0
Immediately
*
Setup
23 (PnA46)
Absolute Encoder Origin Offset
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
-1,073,741,823 to
1,073,741,823
1 reference unit
0
Immediately
*
Setup
Pn808
Ab
s
olute encoder origin
Encoder coordinate
Machine coordinate
Encoder po
s
ition (X)
Origin of machine
coordinate
s
y
s
tem
Change the setting of this parameter when there is no reference (i.e., when DEN = 1). If you
change it during operation, the new setting is enabled from the next reference operation.
Parameter
Meaning
When Enabled
Classification
Pn87E
n.
0
Absolute positioning
Immediately
Setup
n.
1
Positioning in reverse direc-
tion
n.
2
Positioning in forward direc-
tion
n.
3
Positioning by near course
Important







































































