





























BASIC OPERATION
1.3.3 Examples of Connecting Host Controllerscont.
— 1-20 —
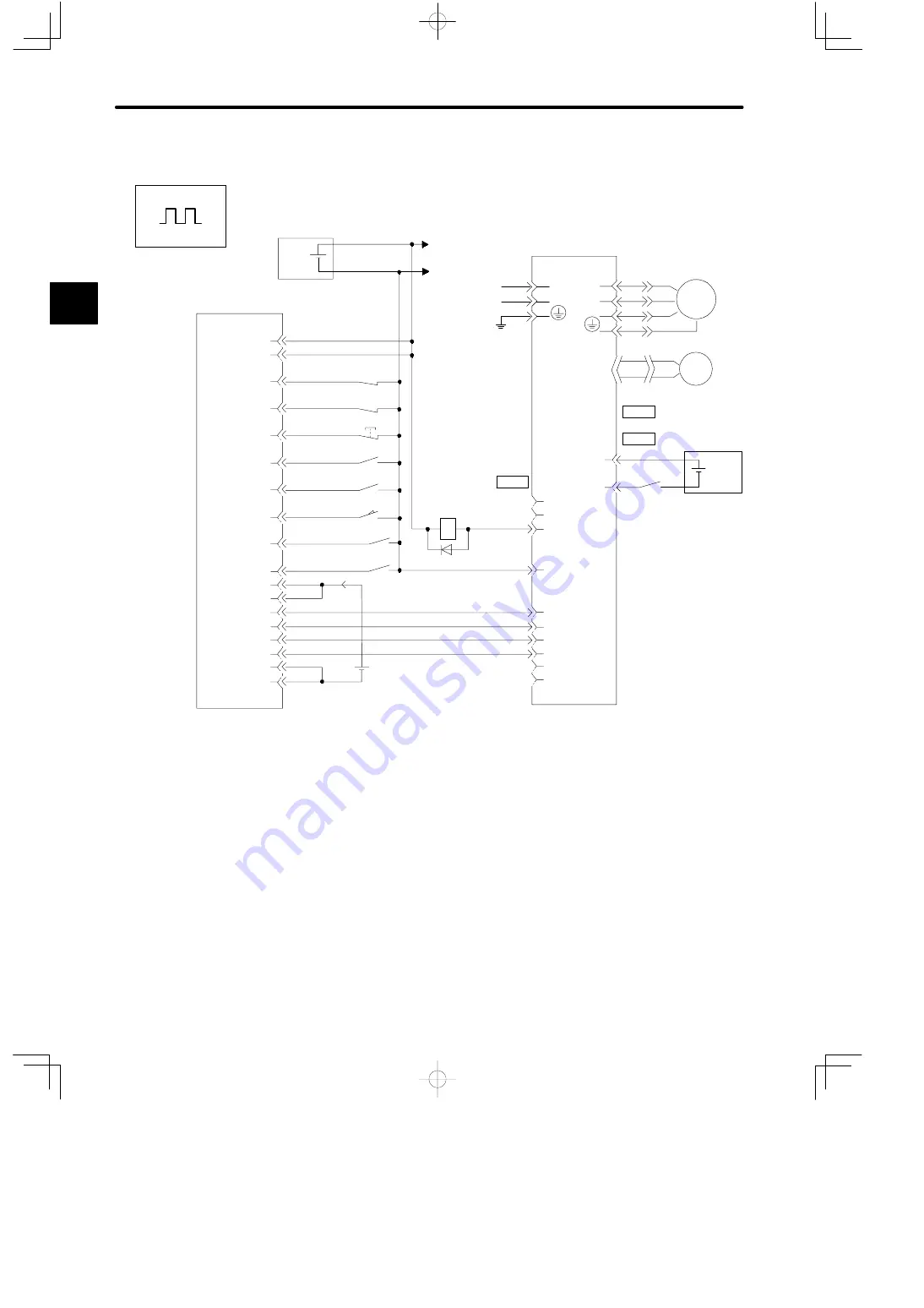
Example of Connecting to OMRON C500-NC112 Position Control Unit
Servopack for Position Control
+12V
+
−
+24V
1A
1B
2A
2B
3A
3B
4A
4B
5A
5B
8A
8B
9A
9B
10A
10B
7A
7B
+24V
CN2
CN1
CN1
+24VIN
/S-ON
PCO
SG
ALM
SG-COM
PULS
/PULS
SIGN
/SIGN
CLR
/CLR
9
1
10
13
7
3
14
15
16
17
18
19
+24V
1Ry
*1
1Ry
0
24
V
C500-NC112
(Made by OMRON)
Servomotor
Servopack
I/O power supply
CW LIMIT
CCW LIMIT
EMERGENCY
STOP
EXTERNAL
INTERRUPT
ORIGIN
ORIGIN
PROXIMITY
LOCAL
READY
+5V
+5V
PULSE OUTPUT
CW+CCW
DIRECTION
OUTPUT
CW
External
power supply
+5V
+5V
*1 The ALM signal is output for approximately two seconds when the power is turned ON. Consider this when
designing the power ON sequence.
Use the ALM signal to operate the alarm detection relay (Relay 1Ry) and turn OFF the power supply to the
Servopack.
Note
Only signals for the OMRON C500-NC112 Position Control Unit and the Yaskawa Servopack are
shown here.
DC24V
GND
U
V
W
M
PG
1
Positions
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































