



























4 Operation
4.3.7 Setting Motor Overload Detection Level
4-22
(2) Changing Detection Timing of Overload (Low Load) Alarm (A.720)
An overload (low load) alarm (A.720) can be detected earlier to protect the servomotor from overloading. The
time required to detect an overload alarm can be shortened by using the derated motor base current obtained
with the following equation.
Note: The detection level of the overload (high load) alarm (A.710) cannot be changed.
Motor base current
×
Derating of base current at detecting overload of motor (Pn52C)
= Derated motor base current
Motor base current: Threshold value of motor current to start calculation for overload alarm
Derating of base current at detecting overload of motor (Pn52C): Derating of motor base current
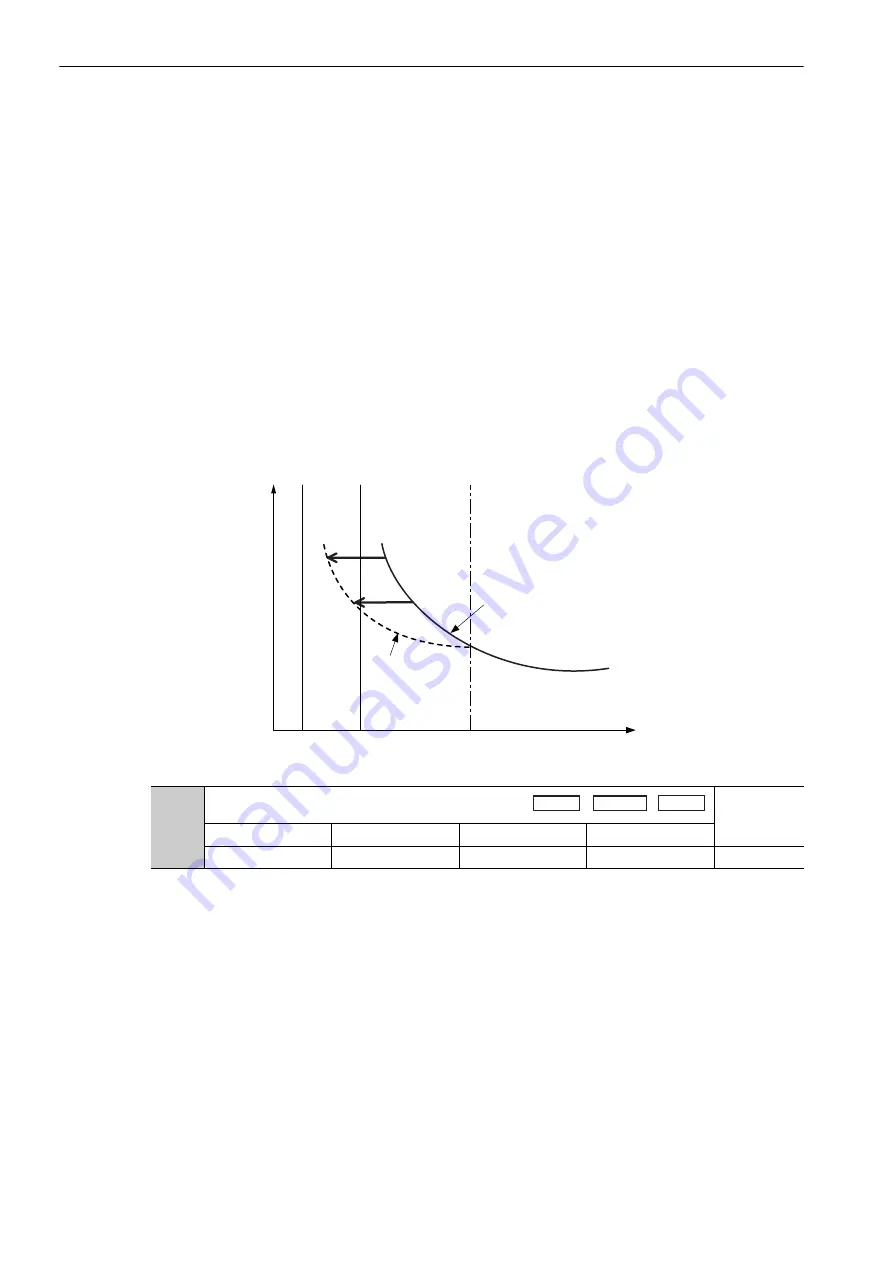
The following graph shows an example of the detection of an overload alarm when Pn52C is set to 50%. The
calculation for the overload of motors starts at 50% of the motor base current and then an overload alarm will
be detected earlier.
Changing the setting of Pn52C will change the detection timing of the overload alarm, so the time required to
detect the overload warning will also be changed.
Note: Refer to
SERVOPACK Overload Characteristics
in the multi-winding drive system catalog for details.
Pn52C
Derating of Base Current at Detecting Overload of
Motor
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
10 to 100
1%
100
After restart
Setup
Detection curve of
overload alarm when
Pn52C = 100% (factory setting)
Detection curve of
overload alarm
when Pn52C = 50%
Torque reference [%]
50%
Overload detection time
100%
200%
Rotation
Speed
Position
Torque







































































