


























4.7 Other Output Signals
4-49
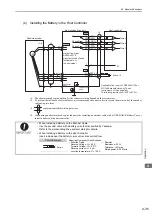
4
Op
er
at
io
n
4.7.3
Rotation Detection Output Signal (/TGON)
This output signal indicates that the servomotor is rotating at the speed set for Pn502 or a higher speed.
(1) Signal Specifications
Note: Use parameter Pn50E.2 to allocate the /TGON signal for use. For details, refer to
3.4.2 Output Signal Alloca-
tions
.
(2) Related Parameter
Set the range in which the /TGON signal is output using the following parameter.
4.7.4
Servo Ready Output Signal (/S-RDY)
This signal is turned ON when the multi-winding drive unit is ready to accept the servo ON (SV_ON) com-
mand.
The /S-RDY signal is turned ON under the following conditions.
• The main circuit power supply is ON.
• No hard wire base block state
• No servo alarms
• The Turn Encoder Power Supply ON (SENS_ON) command is received. (When an absolute encoder is
used.)
If an absolute encoder is used, the output of absolute data to the host controller must have been completed
when the SENS_ON command is received.
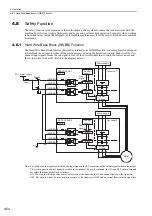
For details on the hard wire base block function, refer to
4.8.1 Hard Wire Base Block (HWBB) Function
.
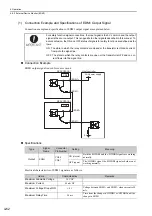
(1) Signal Specifications
Note 1. Use parameter Pn50E.3 to allocate the /S-RDY signal for use. For details, refer to
3.4.2 Output Signal Alloca-
tions
.
2. For details on the hard wire base block function and the servo ready output signal, refer to
4.8.1 Hard Wire Base
Block (HWBB) Function
.
Type
Signal
Name
Connector Pin
Number
Setting
Meaning
Output
/TGON
Must be allocated
ON (closed)
Servomotor is rotating with the motor speed above
the setting in Pn502.
OFF (open)
Servomotor is rotating with the motor speed below
the setting in Pn502.
Pn502
Rotation Detection Level
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
1 to 10000
1 min
-1
20
Immediately
Setup
Speed
Position
Torque
Type
Signal
Name
Connector Pin
Number
Setting
Meaning
Output
/S-RDY
Must be allocated
ON (closed)
The SERVOPACK is ready to accept the SV_ON
command.
OFF (open)
The SERVOPACK is not ready to accept the
SV_ON command.







































































