





























6.5 Program JOG Operation (Fn004)
6-11
6
Utili
ty Fu
ncti
ons (Fn
)
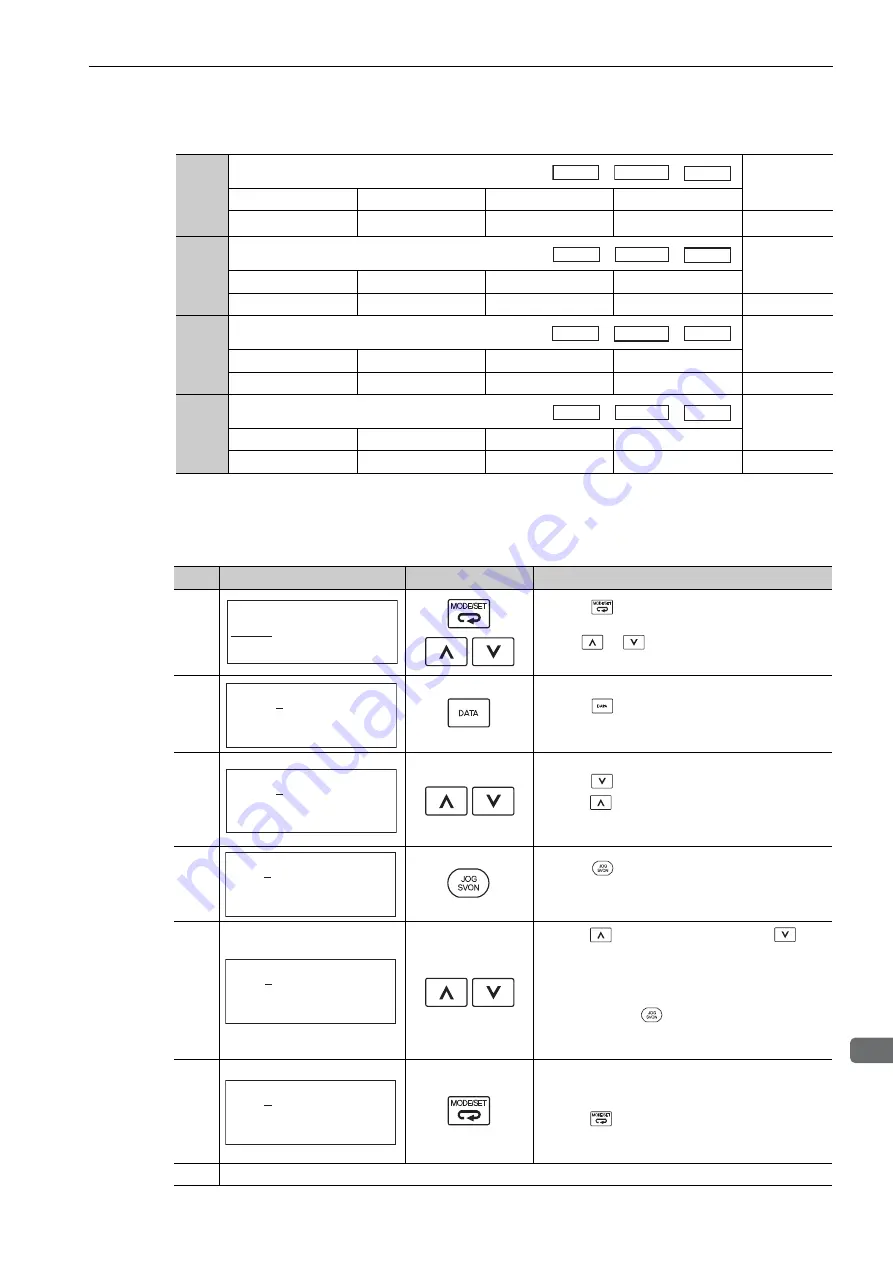
(5) Operating Procedure
Use the following procedure to perform the program JOG operation after setting a program JOG operation
pattern.
∗
The settings can be changed for a parameter.
Pn533
Program JOG Movement Speed
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
1 to 10000
1 min
-1
500
Immediately
Setup
Pn534
Program JOG Acceleration/Deceleration Time
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
2 to 10000
1 ms
100
Immediately
Setup
Pn535
Program JOG Waiting Time
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 10000
1 ms
100
Immediately
Setup
Pn536
Number of Times of Program JOG Movement
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 1000
1 time
1
Immediately
Setup
(cont’d)
Speed
Position
Torque
Speed
Position
Torque
Speed
Position
Torque
Speed
Position
Torque
Step
Display after Operation
Keys
Operation
1
Press the
Key to view the main menu for the
utility function.
Use the
or
Key to move through the list and
select Fn004.
2
Press the
Key. The display changes to the Fn004
execution display.
3
*
Confirm that the parameters have been set.
Press the
Key to view Pn530.
Press the
Key to view the parameters in the fol-
lowing order: Pn530
→
Pn531
→
Pn533
→
Pn534
→
Pn535
→
Pn536.
4
Press the
Key.
The status display changes from "BB" to "RUN", and
the servomotor power turns ON.
5
Press the
(forward movement start) or
(reverse movement start) Key according to the first
movement direction of the preset operation pattern.
The servomotor starts moving after the preset waiting
time in Pn535.
Note: Pressing the
Key again changes the status
to "BB" (baseblocked status) and stops move-
ment even during operation.
6
When the set program JOG operation movement is
completed, "END" is displayed for one second, and
then "RUN" is displayed.
Press the
Key. The servomotor becomes base-
blocked status. The display returns to the main menu
of the utility function.
7
When you finish the program JOG operation, turn the control power supply OFF and ON again.
B B
−
F U N C T I O N
−
F n 0 0 3 : Z
−
S e a r c h
F n 0 0 4 : P r o g r a m J O G
F n 0 0 5 : P r m I n i t
F n 0 0 6 : A l m H i s t C l r
B B
−
P R G J O G
−
P n 5 3 1 = 0 0 0 3 2 7 6 8
P n 5 3 3 = 0 0 5 0 0
P n 5 3 4 = 0 0 1 0 0
P n 5 3 6 = 0 0 0 1 0
B B
−
P R G J O G
−
P n 5 3 1 = 0 0 0 3 2 7 6 8
P n 5 3 3 = 0 0 5 0 0
P n 5 3 4 = 0 0 1 0 0
P n 5 3 6 = 0 0 0 1 0
R U N
−
P R G J O G
−
P n 5 3 1 = 0 0 0 3 2 7 6 8
P n 5 3 3 = 0 0 5 0 0
P n 5 3 4 = 0 0 1 0 0
P n 5 3 6 = 0 0 0 1 0
R U N
−
P R G J O G
−
P n 5 3 1 = 0 0 0 3 2 7 6 8
P n 5 3 3 = 0 0 5 0 0
P n 5 3 4 = 0 0 1 0 0
P n 5 3 6 = 0 0 0 1 0
R U N
−
P R G J O G
−
P n 5 3 1 = 0 0 0 3 2 7 6 8
P n 5 3 3 = 0 0 5 0 0
P n 5 3 4 = 0 0 1 0 0
P n 5 3 6 = 0 0 0 1 0







































































