





























9 Appendix
9.1.2 Parameters
9-26
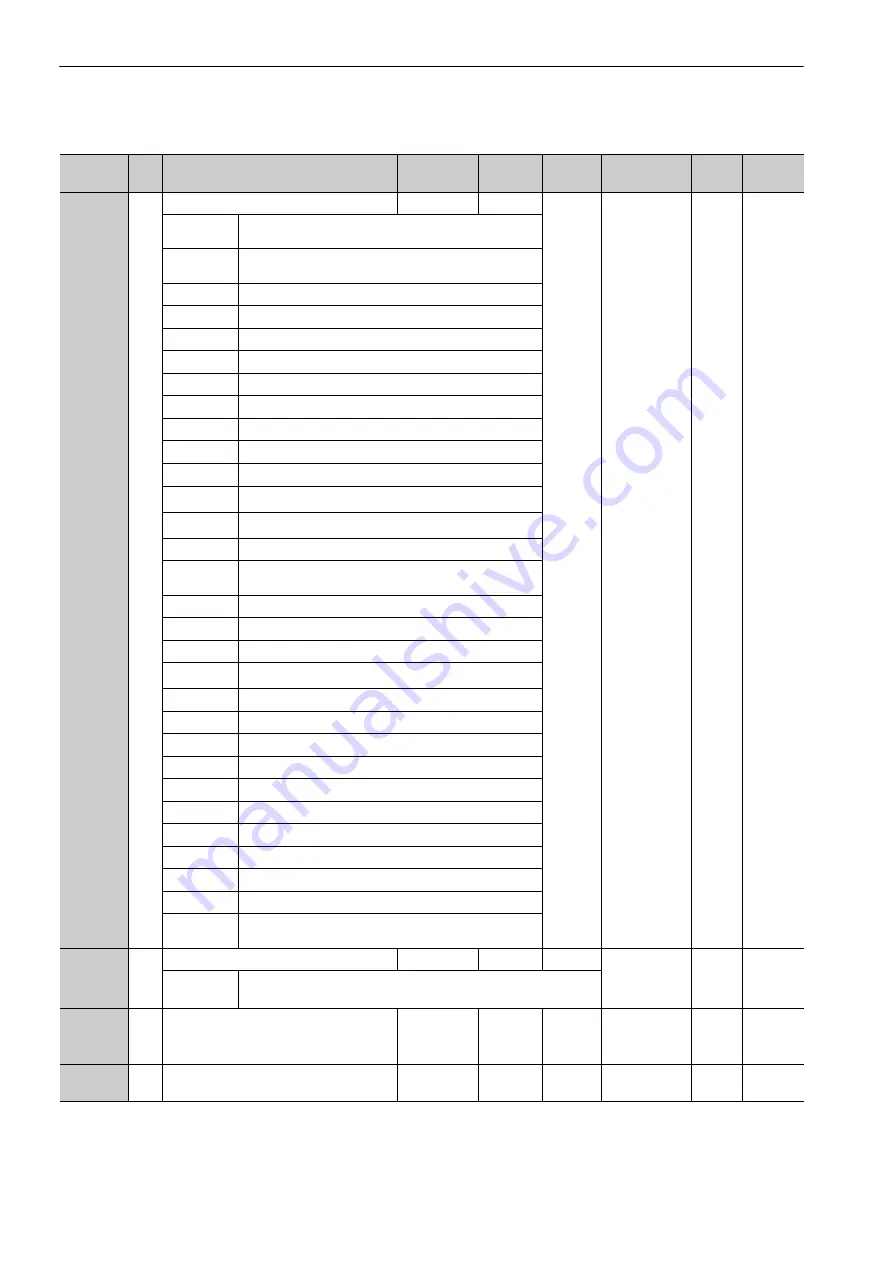
Pn824
2
Option Monitor 1 Selection
–
–
0000
Immediately
Setup
*1
0000H
Motor rotating speed
[1000000H/overspeed detection position]
0001H
Speed reference
[1000000H/overspeed detection position]
0002H
Torque [1000000H/max. torque]
0003H
Position error (lower 32 bits) [reference unit]
0004H
Position error (upper 32 bits) [reference unit]
0005H
System reserved
0006H
System reserved
000AH
Encoder count (lower 32 bits) [reference unit]
000BH
Encoder count (upper 32 bits) [reference unit]
000CH
System reserved
000DH
System reserved
0010H
Un000: Motor rotating speed [min
-1
]
0011H
Un001: Speed reference [min
-1
]
0012H
Un002: Torque reference [%]
0013H
Un003: Rotational angle 1 (encoder pulses from the
phase-C origin: decimal display)
0014H
Un004: Rotational angle 2 [deg]
0015H
Un005: Input signal monitor
0016H
Un006: Output signal monitor
0017H
Un007: Input position reference speed [min
-1
]
0018H
Un008: Position error [reference unit]
0019H
System reserved
001AH
System reserved
001BH
System reserved
001CH
Un00C: Input reference counter [reference unit]
001DH
Un00D: Feedback pulse counter [encoder pulse]
001EH
System reserved
001FH
System reserved
0023H
Primary multi-turn data [Rev]
0024H
Primary incremental data [pulse]
0080H
Previous value of latched feedback position (LPOS)
[encoder pulse]
Pn825
2
Option Monitor 2 Selection
–
–
0000
Immediately
Setup
*1
0000H
to 0080H
Same as Option Monitor 1 Selection.
Pn827
2
Linear Deceleration Constant 1 for Stop-
ping
1 to 65535
10000
reference
unit/s
2
100
Immediately
*6
Setup
*1
Pn829
2
SVOFF Waiting Time (SVOFF at decel-
eration to stop)
0 to 65535
10 ms
0
Immediately
*6
Setup
*1
∗1.
For details, refer to the
Σ
-V Series/DC Power Input
Σ
-V Series/
Σ
-V Series for Large-Capacity Models User’s Man-
ual MECHATROLINK-II Commands
(Manual No.: SIEP S800000 54).
∗6.
Change the setting when the reference is stopped (DEN is set to 1), because the change will affect the output during
operation.
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Reference
Section







































































