




























5 Operation
5.4.6 Positioning Completed Signal
5-44
5.4.6
Positioning Completed Signal
This signal indicates that servomotor movement has been completed during position control.
When the difference between the number of reference pulses output by the host controller and the travel dis-
tance of the servomotor (position error) drops below the set value in the parameter, the positioning completion
signal will be output.
Use this signal to check the completion of positioning from the host controller.
Note: Use parameter Pn50E.0 to allocate the /COIN signal to another terminal. Refer to
3.4.2 Output Signal Allocations
for details.
The positioning completed width setting has no effect on final positioning accuracy.
Note: If the parameter is set to a value that is too large, a positioning completed signal might be output if the position error
is low during a low speed operation. This will cause the positioning completed signal to be output continuously. If
this signal is output unexpectedly, reduce the set value until it is no longer output.
If the position error is kept to a minimum when the positioning completed width is small, use Pn207.3 to
change output timing for the /COIN signal.
Type
Signal
Name
Connector
Pin Number
Setting
Meaning
Output
/COIN
CN1-25, 26
[Factory setting]
ON (closed)
Positioning has been completed.
OFF (open)
Positioning is not completed.
Pn522
Positioning Completed Width
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 1073741824
1 reference unit
7
Immediately
Setup
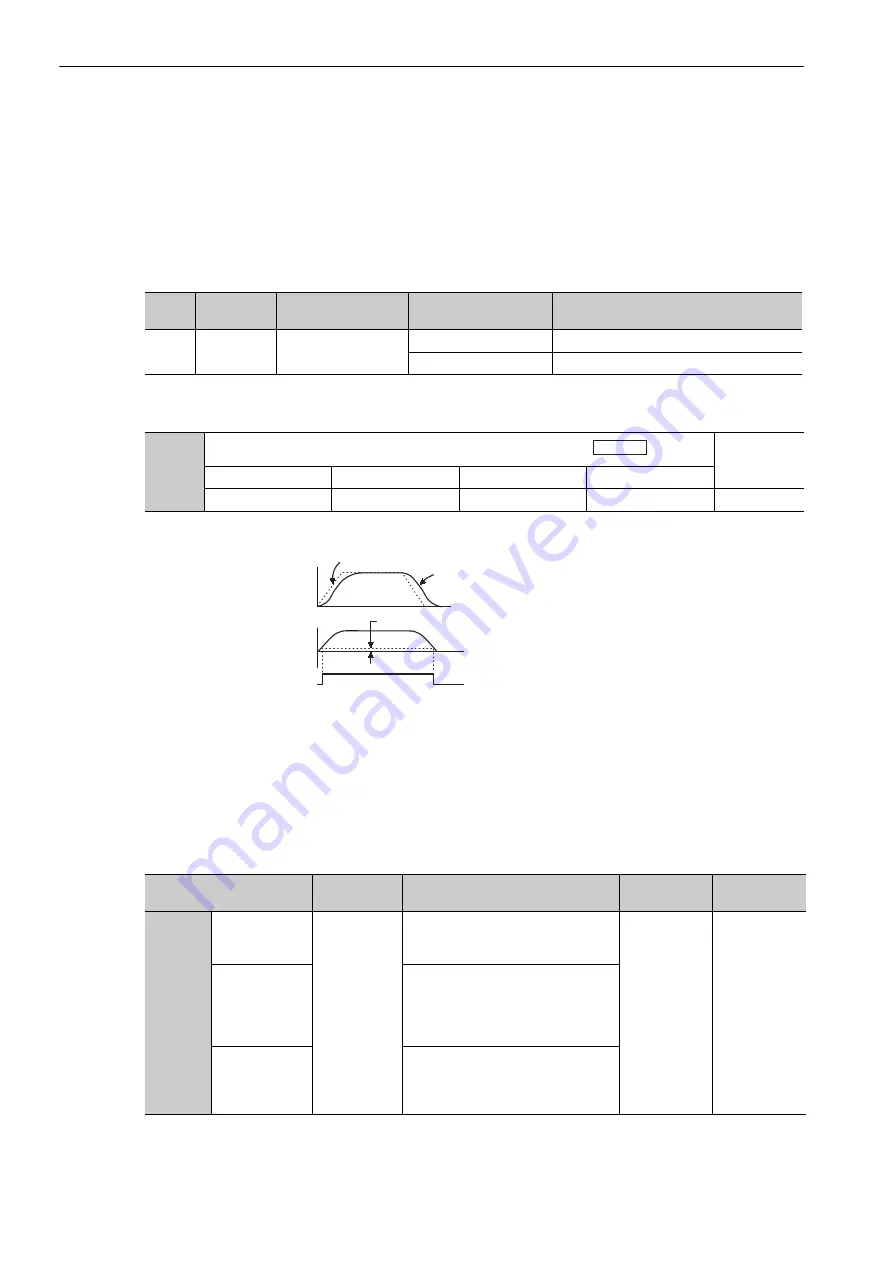
Position
Motor speed
Reference
Motor speed
/COIN
Time
Time
Time
Position error
Effective at ON (close).
Pn522
Parameter
Name
Meaning
When
Enabled
Classification
Pn207
n.0
[Factory setting]
/COIN Output
Timing
When the absolute value of the posi-
tion error is below the positioning
completed width (Pn522).
After restart
Setup
n.1
When the absolute value of the posi-
tion error is below the positioning
completed width (Pn522), and the ref-
erence after applying the position ref-
erence filter is 0.
n.2
When the absolute value of the posi-
tion error is below the positioning
completed width (Pn522), and the
position reference input is 0.







































































