





























Technical data
6
-
31
6.3
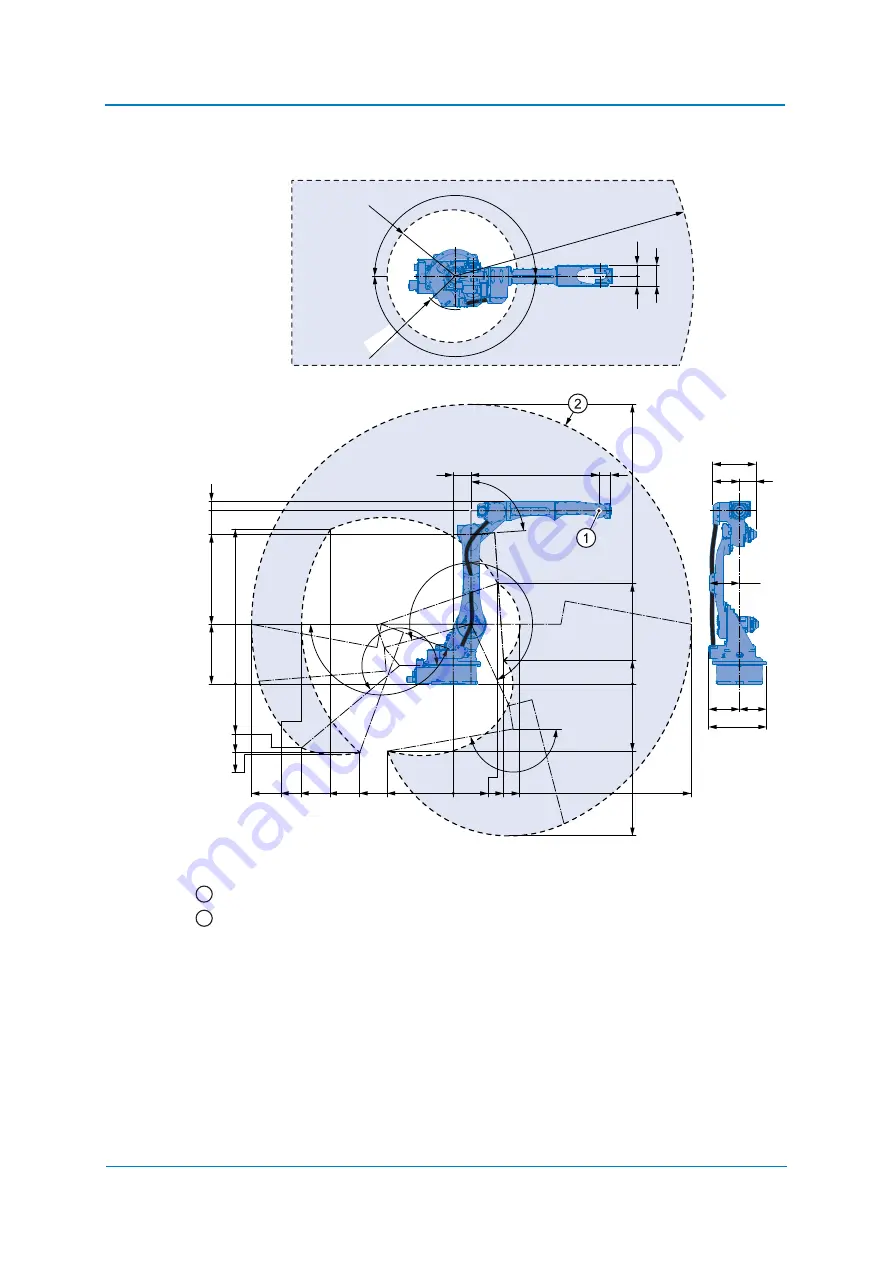
Dimensions and defined working area
Fig. 6-1: Dimensions and maximum working range of the P-point
P point
Maximum P-point range
All dimensions in mm
1309
580
598
0
540
505
760
200
83
1710
792
559
1041
1284
1287
1284
568
0
199
850
2365
2010
0
374
561
425
150
1082
100
105
q
155
q
170
q
220
q
366
227 139
262
229
491
255
160
q
180
q
R285
86
q
R2010
180
q
83.5
177
93.5
R561
1
2
Summary of Contents for YYR-1-06VXH25-A10
Page 1: ...ROBOTICS YYR 1 06VXH25 A10 GP25 12 Standard Operating and Maintenance Manual...
Page 51: ...Maintenance and inspection 9 51 Fig 9 2 Inspection intervals...
Page 56: ...Maintenance and inspection 9 56 9 3 Wrist unit Sealing part U arm Cover Gasket U arm 1 2 3...
Page 77: ...Parts lists 11 77...







































































