
















Copyright 2015-2021 EAI
14 / 16
Note: For more information about the file contents, please refer to
https://github.com/YDLIDAR/ydlidar_ros_driver#configure-ydlidar_ros_driver-internal-
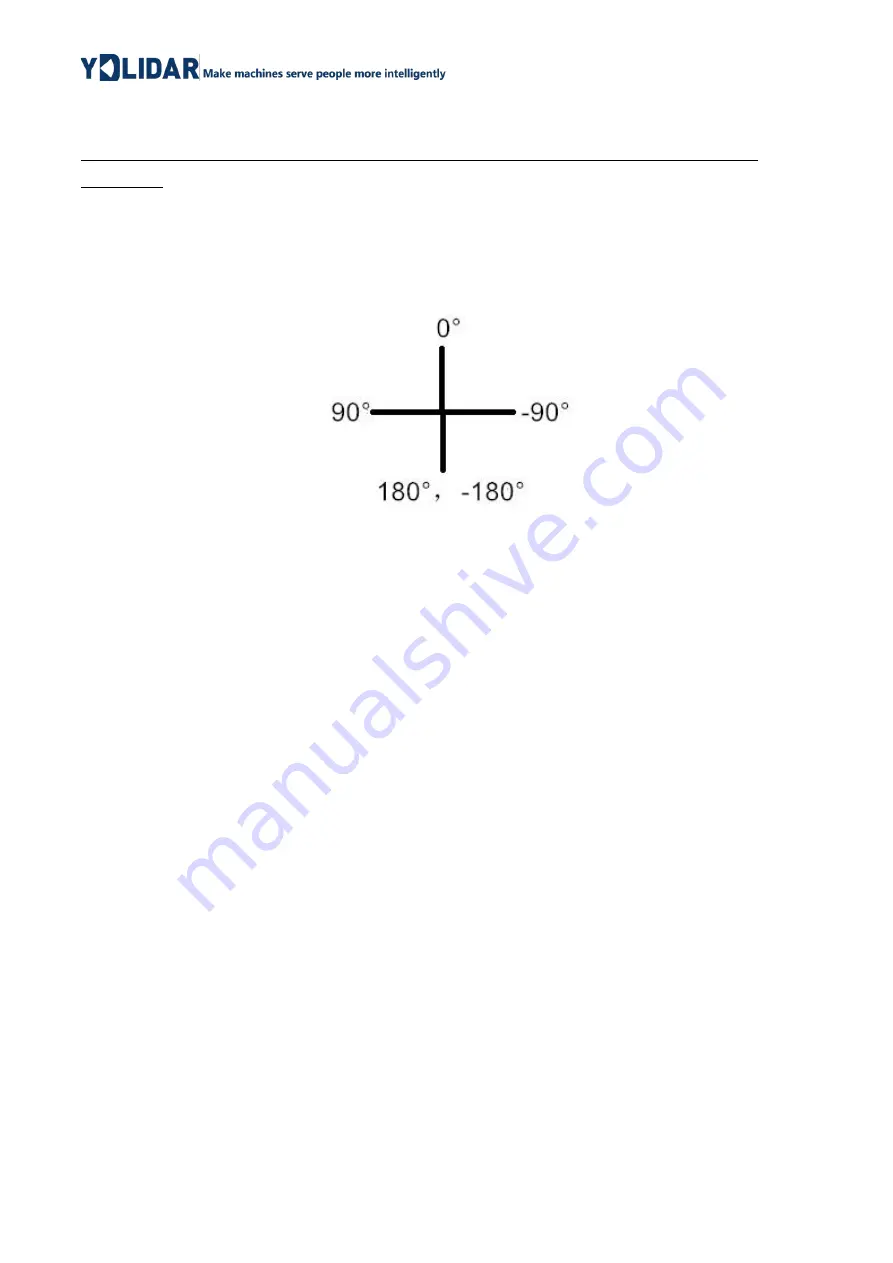
2) The G2 lidar coordinates follow the right-hand rule within ROS, with an angle range of
[-180, 180]. "angle_min" is the start angle, and "angle_max" is the endangle. The
specific scope needs to be modified according to actual use.
FIG 24 YDLIDAR G2 COORDINATES DEFINITION
4
CAUTION
4.1
Ambient Temperature
When the working environment temperature of G2 is too high or too low, it will affect
the accuracy of the distance measuring system. It may also damage the structure of the
scanning system and reduce the life of the G2 lidar. Avoid use in high temperature (>50
degrees Celsius) and low temperature (<0 degrees Celsius) conditions.
4.2
Ambient Lighting
The ideal working environment of G2 is indoor, and the indoor environment light
(including no light) will not affect the work of G2. However, please avoid using strong light
sources (such as high-power lasers) to directly illuminate the G2's vision system.
If you need to use it outdoors, please avoid the G2's vision system directly facing the
sun, which may cause permanent damage to the vision system's photosensitive chip, which
will invalidate the range finding.
The G2 standard version will cause interference in the distance measurement under
the conditions of outdoor strong sunlight reflection, please pay attention to it.







































































