











www.ydlidar.com Copyright 2015-2019 EAI
11
/
12
FIG 14 LIDAR.LAUNCH
FILE
(
2
)
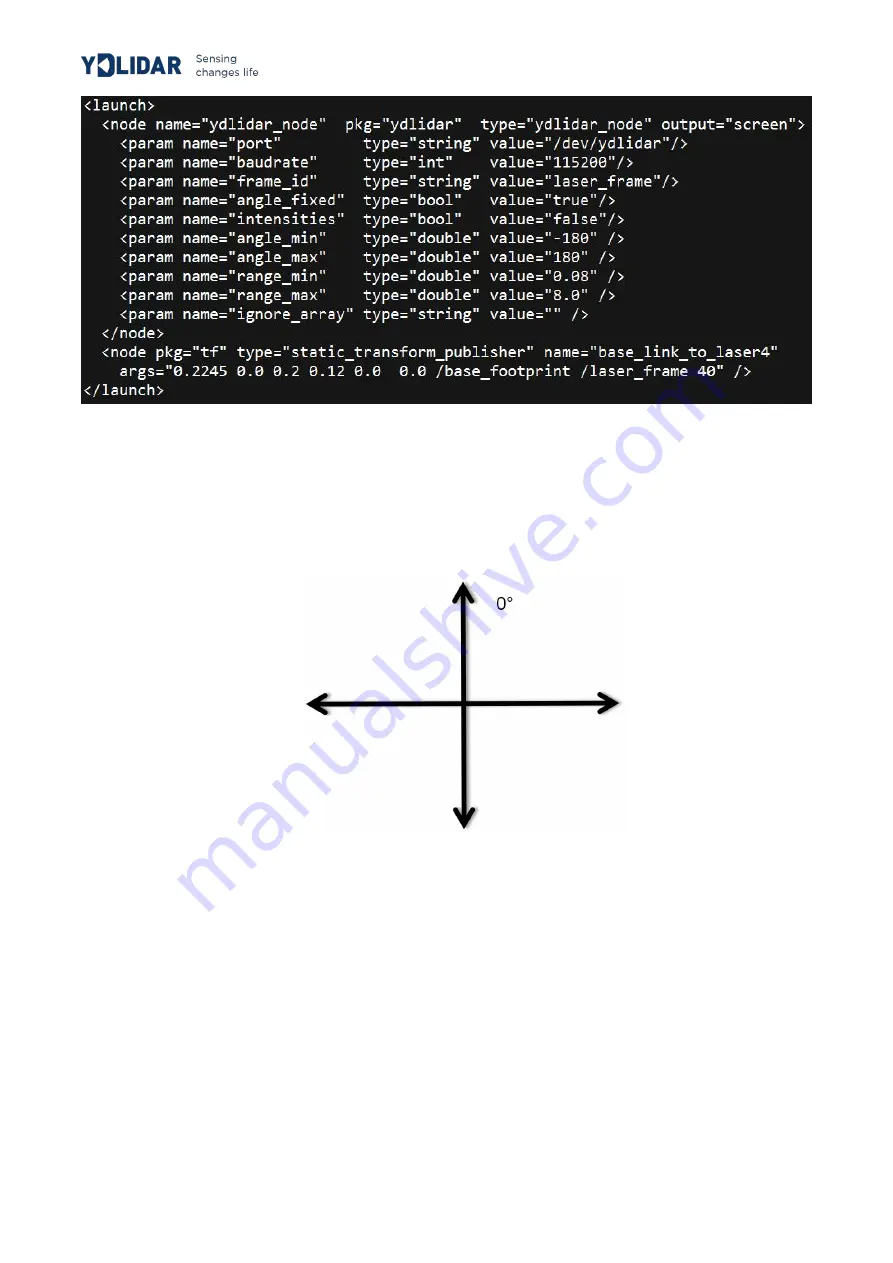
The X2 lidar coordinates follow the right-hand rule within ROS, with an angle range
of [-180, 180]. "angle_min" is the start angle, and "angle_max" is the end angle.
The specific scope needs to be modified according to actual use.
0°
90°
- 90°
180°/-180°
FIG15 YDLIDAR X2 COORDINATES DEFINITION
PRECAUTIONS FOR USE
Temperature
When the working environment temperature of X2 is too high or too low, it will affect the
accuracy of the distance measuring system. It may also damage the structure of the
scanning system and reduce the life of the X2 lidar. Avoid use in high temperature (>40
degrees Celsius) and low temperature (<0 degrees Celsius) conditions.






































































