





























ML-x17 DATA LOGGER MANUAL
Manufacturers of low power instruments
page 67
4.20.5 GPS
This is the driver for a standard NMEA-GPS. Some settings are discussed below. Although every
standard NMEA-GPS can be used, it is convenient to use an YDOC
–GPS, because it can be powered
from the accessory port also. For info about the YDOC GPS receiver read:
logger-GPS-E3329-receiver.html
Note: If GPS sentences are combined with other NMEA sentences with measurement data you want to
log, its recommended to use the ‘Generic NMEA’ driver instead of this ‘GPS’ driver.
4.20.5.1
Minimum satellites to use
The GPS can calculate a position based upon the data of multiple satellites, the minimum amount of
satellites for this calculation is 3. But the calculation gets better, when more satellites are used. This
parameter defines the minimum number of satellites that is used during the calculation. The data logger
tracks the SVS (space vehicles) parameter from the GPS output string to determine this. So, the data
logger will wait for the SVS in the data string to be equal or more than this figure.
4.20.5.2
Time to fix
A GPS receiver has a certain time to Fix (TTF). This is the time from power-on to the calculation of a valid
position. The data logger knows 2 limits to define the timeframe in which it waits for a fix. These are
minimum wait time to fix and maximum wait time to fix. Please use these according the specs of your
GPS. Of course, when a position is found, within the range of this timeframe, the position will be stored,
and the logger will proceed to his next task. If the fix is NOT found, a sensor timeout will occur.
4.20.5.3
Position drift alarming
This is a feature that simplifies the process of setting up an alarm on the position of the device.
Sometimes, it is important to track the position of the system, and to couple an alarm to it. I.e. with buoys
this might be the case. The buoy must measure on a specific location and may drift a few meters, but
must not drift too far. To setup an alarm, with the corresponding limits is very unpractical, because the
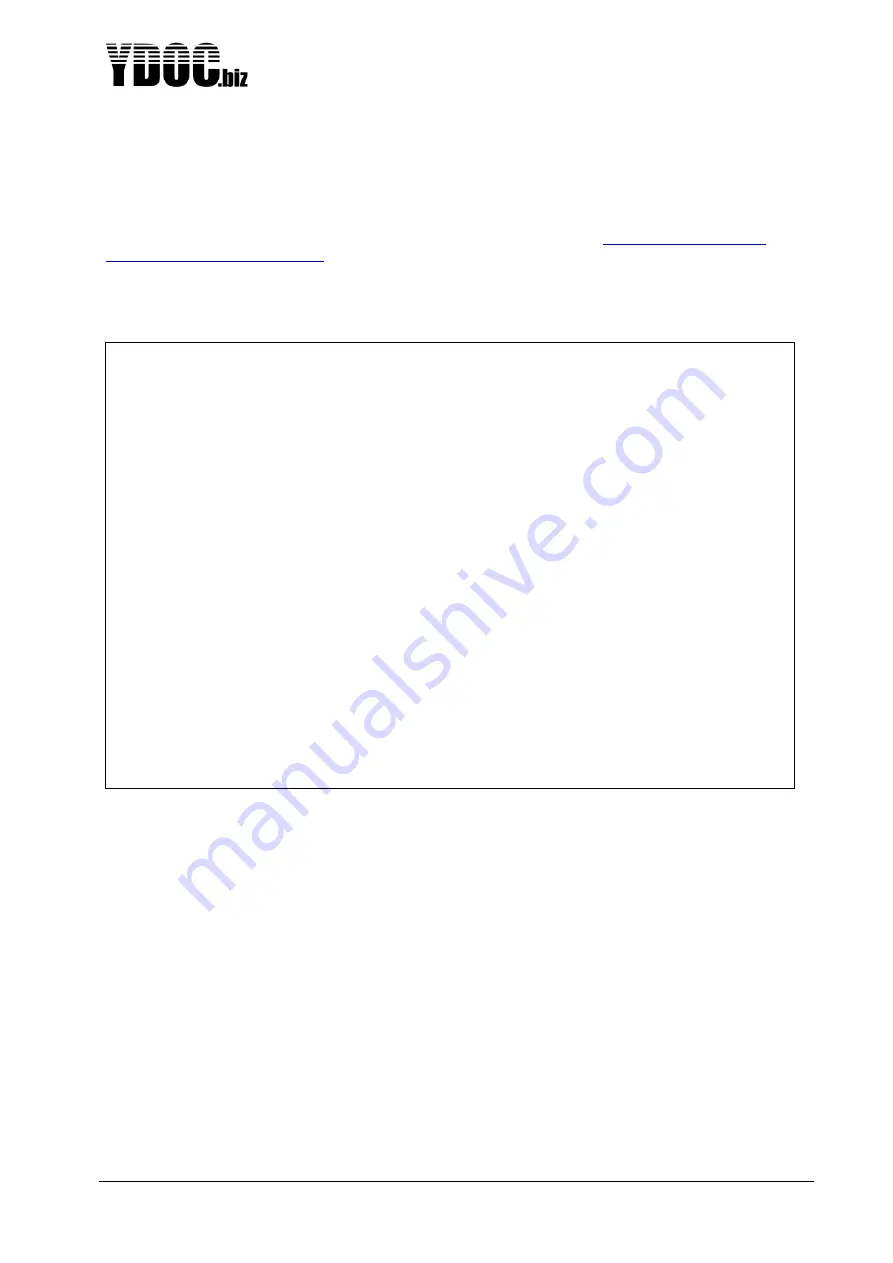
GPS settings
[0] Exit
[1] Name >> GPS
[2] Port settings >> RS232 8N1; 9600 Baud
[3] Accessory power >> Enabled; Warm up 00:00:10
[4] Independent data log >> On
[5] Sample log interval >> 06:00:00
[6] Minimum satellites to use >> 3
[7] Minimum wait time to Fix >> 00:00:00
[8] Maximum wait time to Fix >> 00:01:00
[9] Log raw data string >> Off
[A] GPS time update >> Off
[B] Calculate alarm limits on deployment >> Off
[-] Latitude hi/lo alarm drift >> N/A
[-] Longitude hi/lo alarm drift >> N/A
[-] Latitude hi-hi/lo-lo alarm drift >> N/A
[-] Longitude hi-hi/lo-lo alarm drift >> N/A
[G] Satellites >> Satellites
[H] Latitude >> Latitude
[I] Longitude >> Longitude
[J] Altitude >> Not used
[K] GPS quality >> Not used
[L] Direction >> Not used
[M] Speed >> Not used
[R] Remove
[T] Test measurement
>







































































