

























6-41
TI71M01D06-01EN 3rd Edition: 2012.12.01
200ms/div
NOR M:5kS/s
200ms/div
NORM:5kS/s
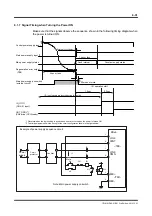
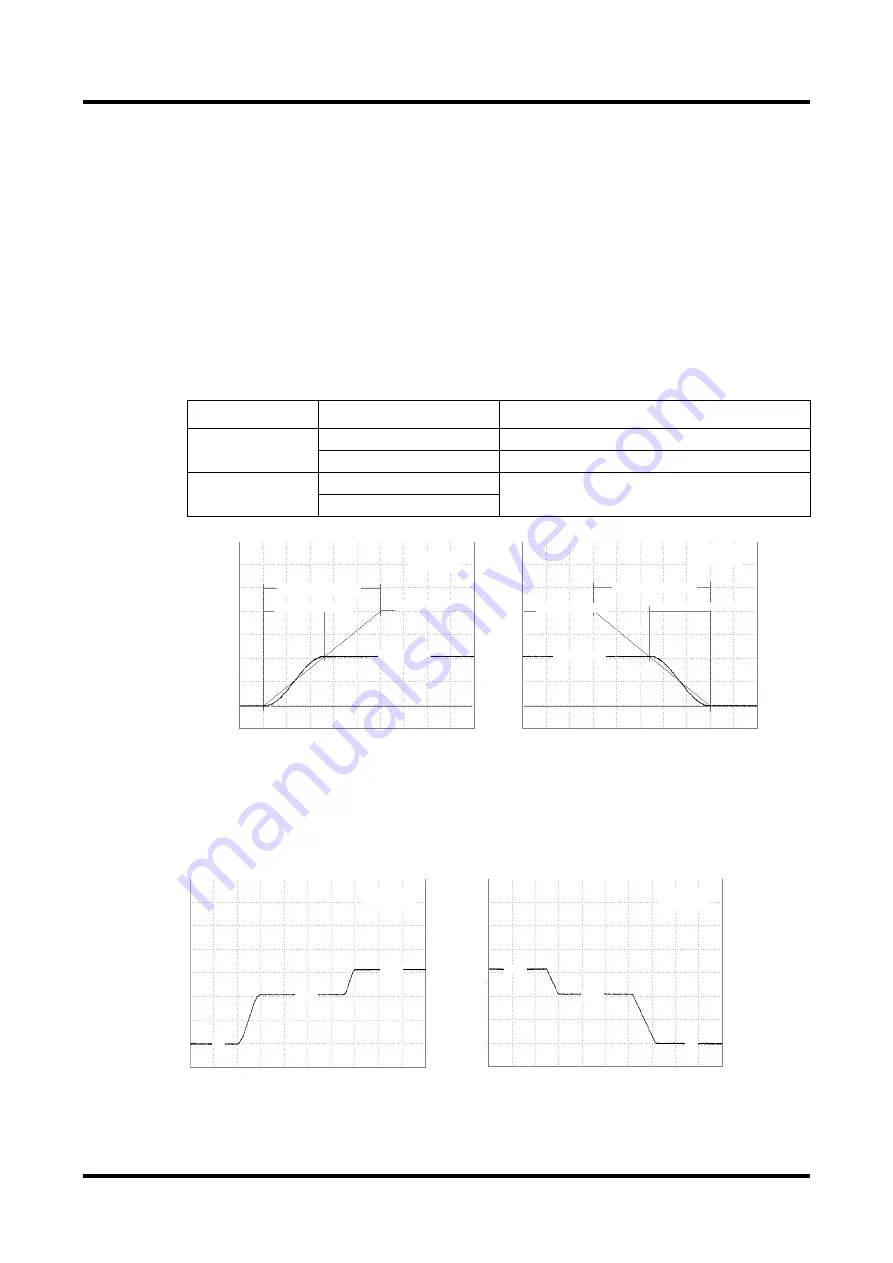
[S-curved profile]
[Acceleration]
[Deceleration]
Waiting for trigger
Feed velocity
Maximum velocity
Set acceleration time
Actual acceleration time
200ms/div
NORM:5kS/s
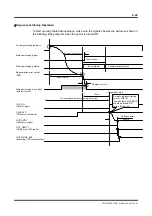
Waiting for trigger
Feed velocity
Maximum velocity
Set deceleration time
Actual deceleration time
200ms/div
NORM:5kS/s
500ms/div
NORM:2kS/s
500ms/div
N ORM:2kS/s
[Acceleration: S-curved profile, Deceleration: Constant acceleration]
Waiting for trigger
500ms/div
NORM:2kS/s
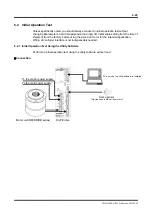
150%
100%
0%
Waiting for trigger
150%
100%
0%
500ms/div
NORM:2kS/s
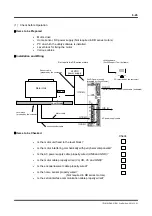
Velocity Override/Interlock Function
The velocity override function allows changing the feed velocity in real time.
In order to use this function, set the velocity override percentage #parameters (#45 and #46)
and select the either of then by the IN_OVERRIDE_SEL signal of the controller interface. The
velocity override value can be set by a #parameter in the range from 0% to 200% in
increments of 0.01%.
Note that if you set the IN_INTERLOCK signal of the controller interface to ON, the velocity
override percentage is set to 0 regardless of the status of IN_OVERRIDE_SEL and the
override percentage #parameters (#44 and #45) (the motor will decelerate and stop).
Note that if a value exceeding 100% is specified, the velocity while moving may exceed the
maximum velocity and an error may occur (ERR31.0: Excessive position command difference,
ERR24.0: Over speed).
Velocity override function performs all table data operations and jog moves.
Interlock
IN_INTERLOCK
Velocity override selection
IN_OVERRIDE_SEL
Feed velocity
OFF
OFF
Velocity override percentage 1 (#44) x feed velocity
ON
Velocity override percentage 2 (#45) x feed velocity
ON
OFF
0
ON
The resulting feed velocity while moving becomes the velocity obtained by multiplying the
specified velocity with the velocity override value.
If the velocity override value is changed while moving, the motor accelerates with the same
acceleration profile and rate as specified by the acceleration settings of Table "Velocity Profile
Setup Items" in Section 6.1.9, "Velocity Profile" if it is increase Motor decelerates accordingly
if it is decreased.







































































