





























6-68
TI71M01D06-01EN 3rd Edition: 2012.12.01
6.4.3 Auto-tuning Operation
In order to tune the servo properly, it is necessary to register the load inertia in #0 [Load
inertia/Load mass]. When auto-tuning is performed, the load inertia is estimated and the
control # parameters are set automatically. Perform auto-tuning when starting up the system
and when the load inertia changes significantly.
#parameters Set Automatically by Auto-Tuning
The #parameters set automatically by auto-tuning vary depending on the specified control
mode, control method and states of IN_POSFREQ and IN_VELFREQ_SEL (see the table
below).
#parameters Set Automatically by Auto-Tuning
#1 [servo stiffness
setup]
#parameters automatically set by auto-tuning
Position control parameter (*1)
Velocity control parameter (*2)
Position control
bandwidth #8/#9
Position integral limiting
value #12/#13
Velocity control
bandwidth
#2/#3
Velocity integral limiting
value #6/#7(*3)
13 39
A value that specifies the
maximum torque that may
be output by the integrator
in the controller to remove
a small position deviation
(the value changes
depending on the motor
model, load inertia and
servo rigidity setting
value).
150
A value that specifies
the maximum torque
that may be output by
the integrator in the
controller to remove a
small velocity deviation
(the value changes
depending on the motor
model, load inertia and
servo rigidity setting
value).
12
38 140
11 36
130
10 34
120
9
32 110
8 30
100
7
28 90
6 26
80
5 24
70
4 22
60
3
19 50
2 16
40
1 14
30
0 9
20
-1 8
15
-2
6 12
-3 5
10
*1
Set to #8and #12 if IN_POSFREQ_SEL is OFF and to #9 and #13 if it is ON.
*2
Set to #2 and #6 if IN_VELFREQ_SEL is OFF and to #3 and #7 if it is ON.
*3
Set only when the velocity control method is set to proportional integral control in
system setup register 1 (0 is set in the case of proportional control).
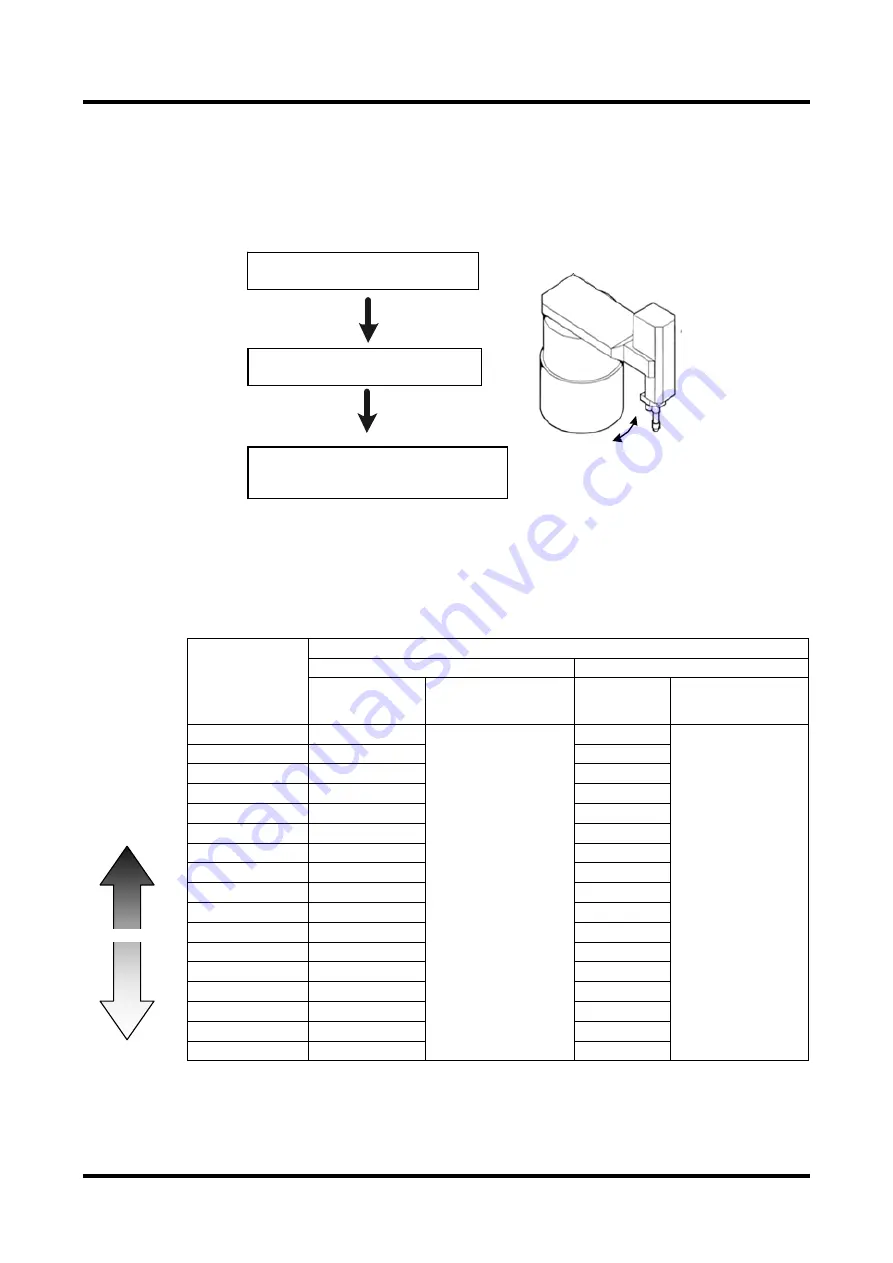
The motor reciprocates several times and
the lord inertia is estimated
The estimated load inertia is automatically
set in #0
The control #parameters corresponding to
#1 [Servo stiffness setup] (see the table below)
are set automatically.
Position feed forward,
velocity feed forward,
acceleration feed forward
and various filters
are not adjusted
Servo stiffness
(response)
Lower
Higher
Default setting







































































