





























6-77
TI71M01D06-01EN 3rd Edition: 2012.12.01
STEP 7 Home movement
The motor is moved to the detected Z-pulse edge position. In the case of a motor equipped
with software Z-pulse, correction movement is performed twice as well.
STEP 8 Home offset movement
The motor is moved an amount given by the value set in parameter #56 [Offset distance from
home position]. Then, at that position the coordinate value in command units is set in the
setup value of parameter #57 [Coordinate value in command units after homing].
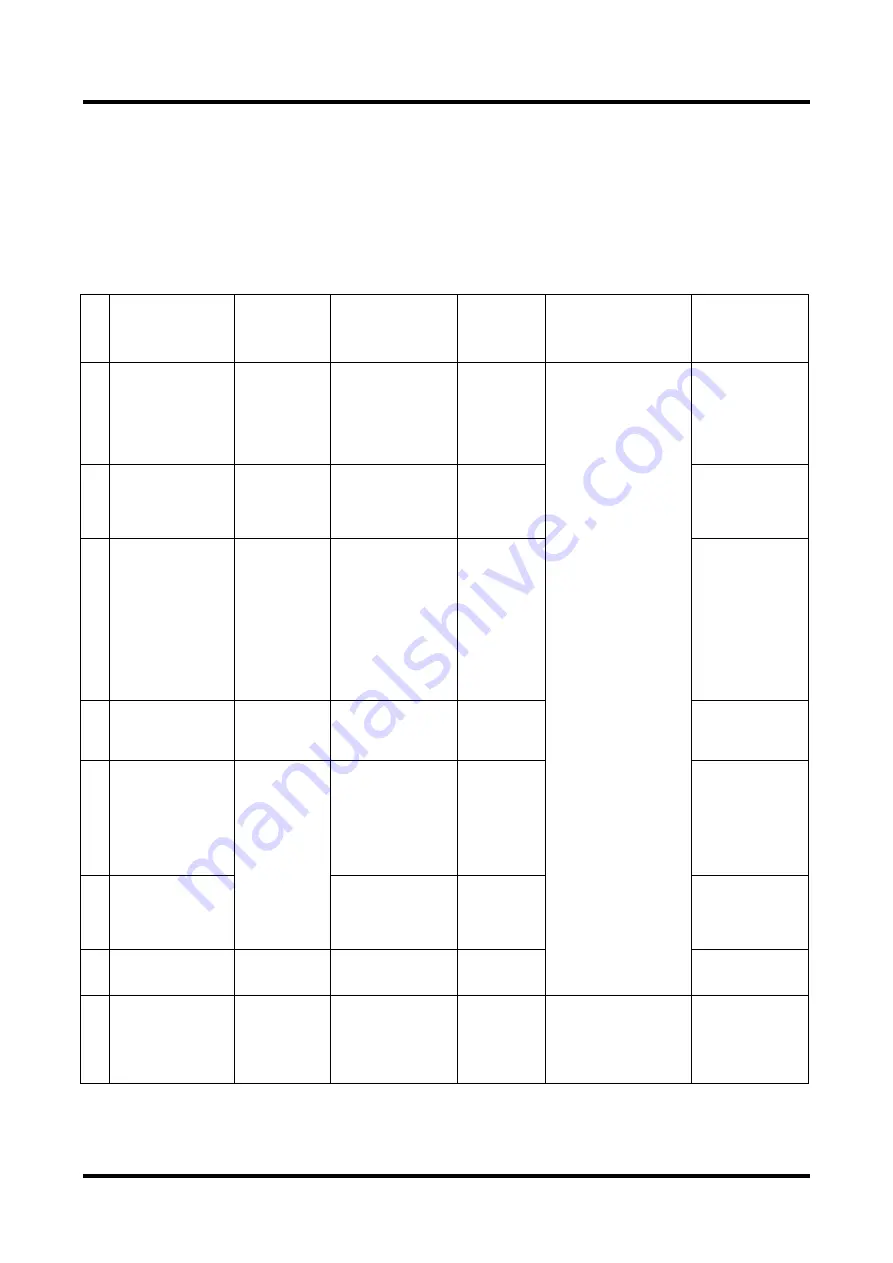
Step No.
Operation
Execution
condition
Operation overview
Moving
direction
Acceleration/
deceleration type
Acceleration/
deceleration time
Feed velocity
1
EOT search
movement
Performed only
when [Hardware
EOT limit active
in homing
operation] is set
to [Enable] for
table data
The motor
decelerates and stops
after detecting the
hardware EOT signal.
Opposite to
the homing
direction (set
in table data)
#60 [Homing EOT
sensor search
velocity]
2
Home sensor search
movement
Performed
when [Enable] is
selected for
[Enable home
sensor]
The motor
decelerates and stops
after detecting the
home sensor signal.
Homing
direction set in
table data
#61 [Home sensor
search velocity in
homing operation]
3
Moving outside the
home sensor area
Always
performed
Depends on #parameter
[homing, select home
sensor inside]
Inside: The motor
decelerates and stops
after moving outward
from the home sensor
area.
Outside: The motor
performs step 4 without
stopping after passing
through the home sensor
area.
Depends on
#parameter
[homing,
select home
sensor inside]
Inside: CW
direction
Outside: CCW
direction
Set using "Select
acceleration type,"
"Select deceleration
type," "Select
acceleration time" and
"Select deceleration time"
in the table data.
#62 [Initial Z-pulse
search velocity]
4
First home detection
movement
Always
performed
The motor searches
for the rising edge of
the Z-pulse, and
decelerates and stops
CCW direction
(cannot be
changed)
#62 [Initial Z-pulse
search velocity]
5
Second and onward
home detection
movement
(preliminary
movement)
Repeated for
the number of
times set by #58
[Z-Pulse
sensing
iterations during
homing]
The motor moves in
the [CCW] direction
from the home
position for the
amount set in #55
[overshoot], and
decelerates and
stops.
CW direction
(cannot be
changed)
#62 [Initial Z-pulse
search velocity]
6
Second and onward
home detection
movement (Z-pulse
edge search
movement)
The motor searches
for the rising edge of
the Z-pulse, and
decelerates and stops
CCW direction
(cannot be
changed)
#63 [Z-pulse search
velocity after 2nd
iteration]
7 Home
movement
Always
performed
The motor stops after
moving to the home
position.
Home
direction
#62 [Initial Z-pulse
search velocity]
8
Home offset
movement
Performed if the
amount of home
offset
movement is
different from 0
The motor moves to
the offset coordinate
position set in #56.
#56 > 0:
Forward
direction
#56 < 0:
Reverse
direction
System setup register 3
System setup
register 3
EOT search movement is set to invalid until the motor settles during homing. All other steps are Valid.
The settling width can be set in the homing table.







































































