





























6-83
TI71M01D06-01EN 3rd Edition: 2012.12.01
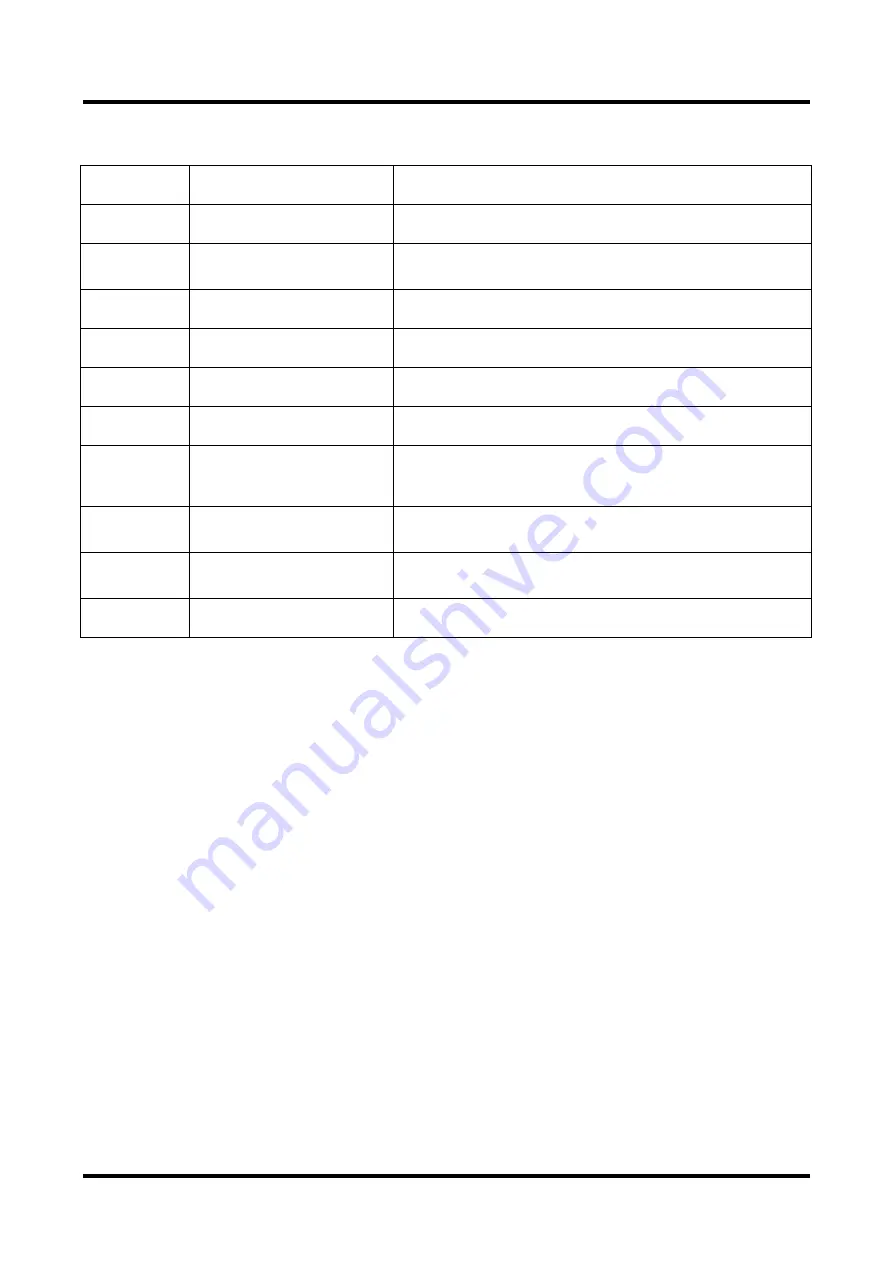
#parameters Related to the Homing Function
#parameter No.
#parameter name
Description
#60
Homing EOT sensor search velocity
Only valid when [Enable] is selected for [Homing, hardware EOT limit active
in homing operation]
#61
Home sensor search velocity in
homing operation
Set the velocity to be used when searching for the home sensor during the
homing operation. Use the initial value under normal circumstances.
#62
Initial Z-pulse search velocity
Use the initial value under normal circumstances.
#63
Z-pulse search velocity after 2nd
iteration
Use the initial value under normal circumstances.
#55
Overshoot distance in homing
operation
Use the initial value under normal circumstances.
#58
Z-Pulse sensing iterations during
homing
Use the initial value under normal circumstances.
#56
Offset distance from home position
Enter the amount of home offset.
The offset movement is only performed for the amount specified by this
#parameter after homing, and the position is set as the origin of the
coordinate system.
#57
Coordinate value in command units
after homing
Use the initial value under normal circumstances (#57 = 0).
This parameter specifies the command unit command coordinate value after
the completion of homing.
System setup
register 3
Homing, home offset movement feed
velocity selection
It is not necessary to set this parameter if #56 = 0.
This parameter sets the feed velocity at which the motor should move to the
offset position after the completion of homing operation.
System setup
register 3
Homing, enable dog position error
Use the initial value under normal circumstances (Enabled).







































































