



























7-2
TI71M01D06-01EN 3rd Edition: 2012.12.01
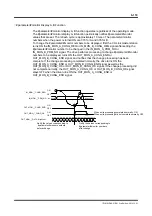
Main Causes of Motor Oscillation and Actions to be Taken
Type of
vibration
Phenomenon at
oscillation
Cause of oscillation and action to be taken
Low-fr
equency o
scillation
Hunting
Vibration
frequency: up to
several Hz
Operation angle:
several degrees
to several tens of
degrees (run out
of control in some
cases)
Cause of Oscillation
Oscillation occurs when the ratio between the position control frequency
bandwidth and the velocity control frequency bandwidth is inappropriate
The motor may oscillate if the velocity control bandwidth is less than 3
times the position control bandwidth.
Oscillation may also occur if the inertia moment value estimated by
auto-tuning is not appropriate or if there are large load fluctuations (1.5
times or more).
Action to be Taken
•
Repeat auto-tuning several times and check the inertia value
afterward. Check that the accuracy of the inertia value estimated by
auto-tuning is 20% or less in repeated auto-tuning operations.
•
Lower the setup value of #0 [servo stiffness setup].
Windup
Cause of Oscillation
The motor may oscillate if the value of the position integral limiter is too
large; the position deviation becomes too large and the control system
becomes unstable.
Action to be Taken
Adjust the "integral limiter value."
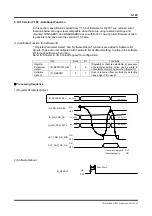
High-freq
uency oscillation
Phase shift
oscillation
Vibration
frequency:
several tens of Hz
to 200Hz
Operation angle:
up to several
degrees
Cause of Oscillation
•
If the frequency at which the phase of the velocity output signal lags
180
°
behind the phase of the velocity input signal (180
°
phase shift) is
denoted fr, the motor oscillates with a frequency of fr when fr < fv.
•
Oscillation may occur if various filters use the same frequency or the
velocity control bandwidth and the filter frequency bandwidth are the
same.
Action to be Taken
Lower the setup value of #1 [servo stiffness setup].
Resonance
Vibration
frequency:
several tens of Hz
to 2kHz
Operation angle:
up to a few
degrees
Cause of Oscillation
•
The motor may oscillate if disturbance from the mechanical
resonance of the load enters into the velocity control loop.
In many cases, there are several resonance frequencies.
Action to be Taken
•
Set the mechanical rigidity of the device higher (see Section 7.2.1,
"Prevention of Mechanical Resonance").
•
Dampen the gain at the resonance point by filtering (see Section
7.2.2, "Filters").







































































