





























1-5
IM 04P02B01-01E
Functional Description
1
Noise Elimination from Input Signals
Filter and Moving Average
This function used to suppress the effects of noise that is riding on the signal. The pen
model and dot model are equipped with a filter function and a moving average function,
respectively. The function can be set for each measurement channel. However, it does
not operate on channels set to ON/OFF input.
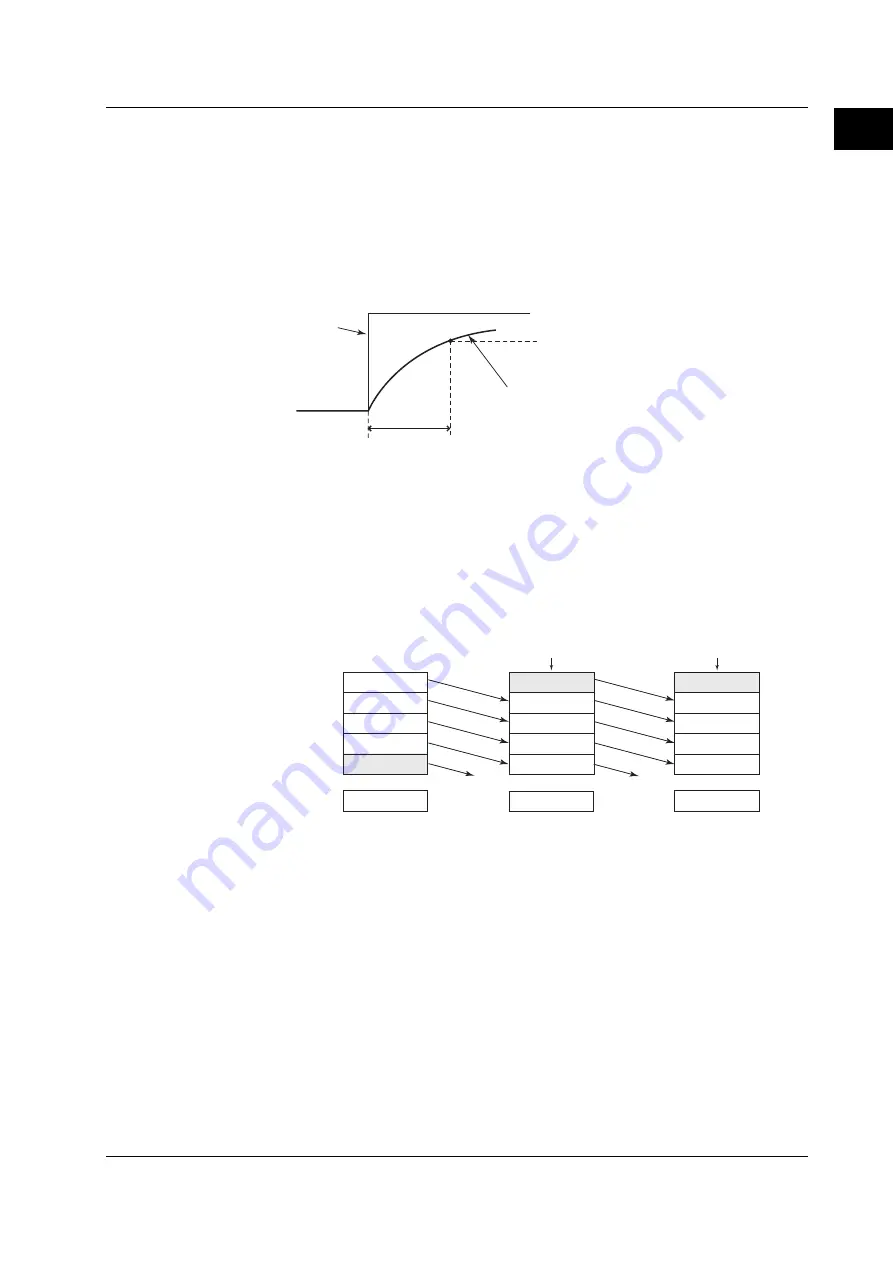
• Filter (Pen Model)
The filter is a low-pass filter. The time constant can be set to 2 s, 5 s, or 10 s.
63.2% of the output value
2, 5, 10 s (time constant, the time it takes
to reach 63.2% of the output value)
Output response curve
(when using the filter)
Input
Filter result (output for a step input)
• Moving Average (Dot Model)
The average value of the m most recent values acquired at the scan interval is used
as the measured value of the channel. The number of moving-averaged data points
(m) can be set in the range 2 to 16. The figure below shows an example indicating
the operation of the buffer for the moving average computation when the number of
moving averaged data points is set to 5.
1
2
3
4
5
10.0 mV
5.0 mV
0.0 mV
–5.0 mV
–10.0 mV
0.0 mV
15.0 mV
10.0 mV
5.0 mV
0.0 mV
–5.0 mV
5.0 mV
10.0 mV
15.0 mV
10.0 mV
5.0 mV
0.0 mV
8.0 mV
Deleted
Deleted
Moving
average
Most recent data
Most recent data
Buffer data for the
nth sampling time
Buffer data for the
n+1th sampling time
Buffer data for the
n+2th sampling time
<Related Topics>
Setting the filter: Section 7.12 and 6.2
Setting the moving average: Section 7.11 and 6.3
1.2 Measuring Input Section







































































