





























47
4.34 Buoyancy and Balance
If the AUV is not properly balanced and weighted, vehicle performance will be affected.
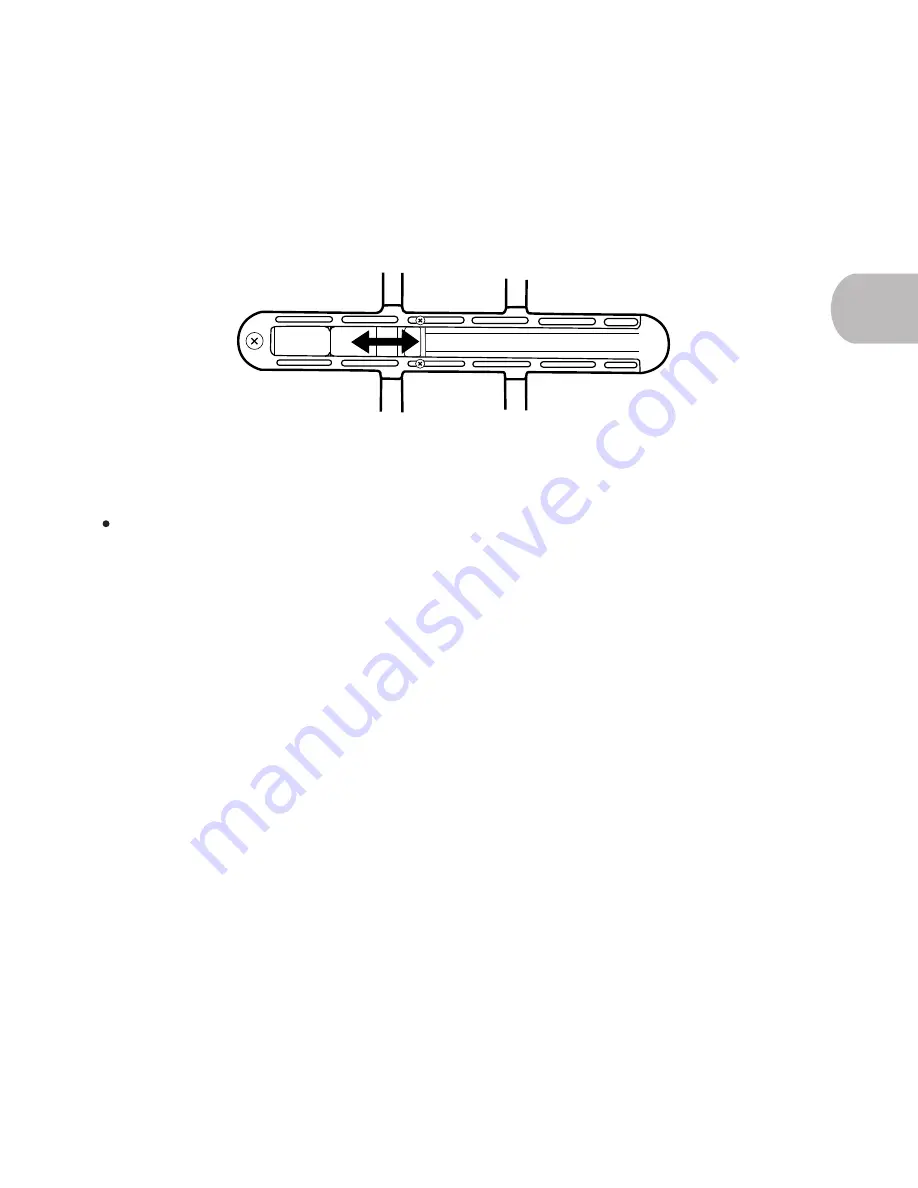
1. Visually confirm that you that the appropriate weights are in the weight track on the bottom of the vehicle.
2. Gently lower the vehicle into water, but do NOT release the vehicle (you may want to tie a rope to the handle
for these tests, at least for initial use). Loosely hold the handle, allowing the vehicle to float on its own. Only
the antennae and tail fin should break the water’s surface (some of the top of the vehicle may as well).
3. If the vehicle begins to sink, floats too high in the water, or is balanced nose or tail heavy, swap or move the
weights in the track accordingly. (Loosen the weights with a Phillips screwdriver.)
4. If the vehicle is sufficiently buoyant, push the vehicle underwater and watch for even rise to the surface.
If 7-8 oz of weight are placed on top of the AUV, it should sink to the bottom of the bulb on the WiFi antenna. If the
vehicle sinks past this point, there is too much balance weight on the AUV and some should be removed. If the AUV
does not sink to this point it is too buoyant and more weight needs to be added to the track.
If the weights on the vehicle are too heavy for the body of water, the AUV will sink in the event of power loss.
4.35 Pinger frequency
In the event that the vehicle is lost underwater, you will need to know the vehicle’s location pinger frequency. The
frequency and sounding order is located on the pinger itself. The frequency is in kHz and the sounding order is
three numbers located independently (not identified with ‘ns’). The order is what you will listen for in the event of an
underwater recovery. Write down the pinger’s frequency and sounding order.
NOTE
4.3







































































