





























60
5.3
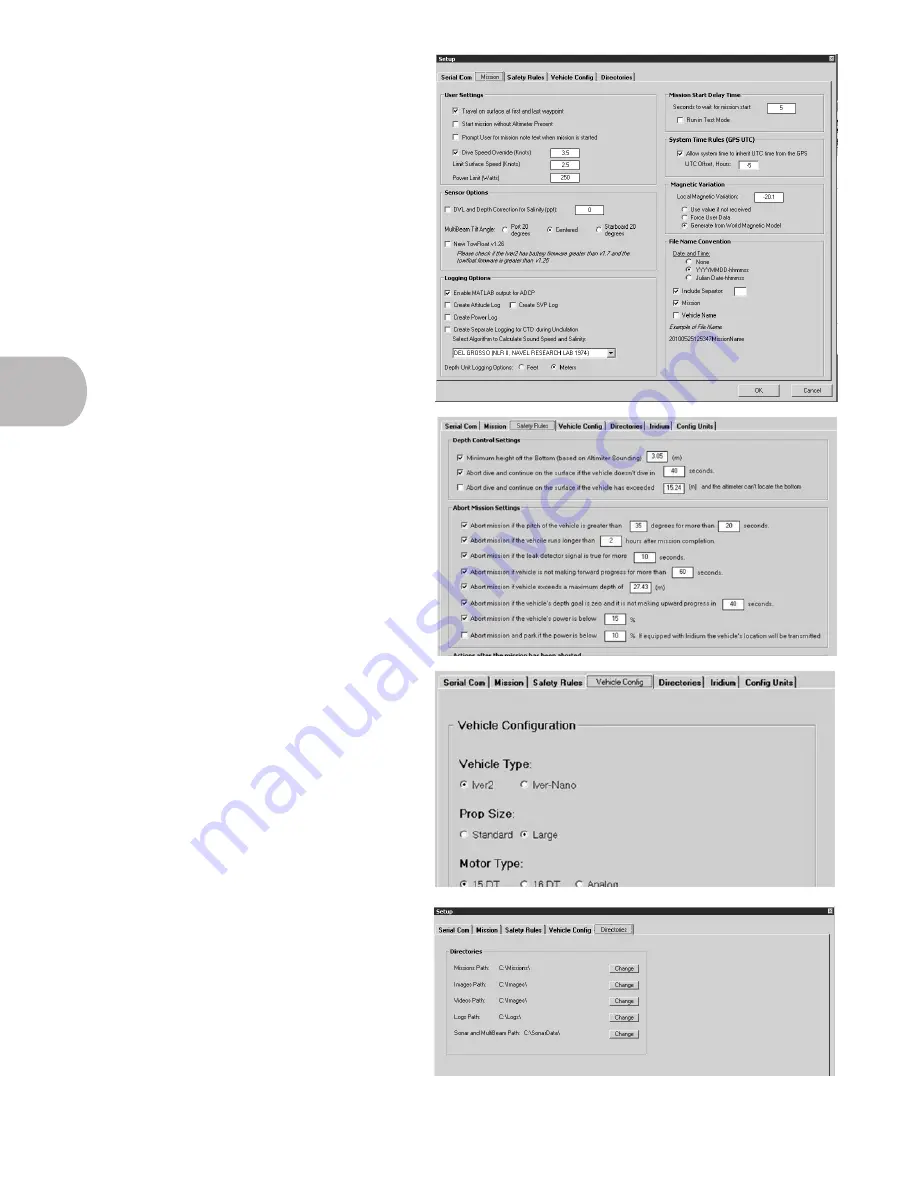
Missions
The ‘Missions’ tab displays several basic controls for
every mission.
• User Settings - Basic presets. Do not alter.
• Sensor Options - If your vehicle is equipped
with a multi-beam sonar unit for bathymetry,
select the unit’s physical orientation. Do not
alter other settings.
• Logging Options- If your vehicle is equipped
with an ADCP, select ‘Enable MATLAB
output for ADCP’ for easy post-deployment
data processing. Do not alter other settings.
• Mission Delay Time - How long the vehicle
pauses after receiving the command to start a
mission. Do not alter.
• System Time Rules - Allows the vehicle to
receive time data from GPS. Do not alter.
• Magnetic Variation - Dictates how the
vehicle should compensate for magnetic
variation. Do not alter.
• File Name Convention - Dictates how the
vehicle names log files. Do not alter.
Safety Rules
Select any and all safety rules you wish to apply to a
vehicle’s mission. If any selected safety rule is engaged
the vehicle will do one of two things.
1. “Start the Safety Projected Path mission” - If
this box is checked, a vehicle will begin to
navigate a safe path defined by the user.
2. If the vehicle does not have a Safety
Projected Path or cannot navigate to it, the
vehicle will turn off its motors in an attempt
to float to the surface.
All safety rules can be engaged and disengaged as you
see fit for your mission. You may also modify each rule
by changing the user-determined value in each white
box found throughout the rules.
Vehicle Config
These settings help the vehicle appropriately control the
navigational fins’ servos based on your specific vehicle.
Do not alter these settings.
Directories
Changing directories based on missions, locations, or
vehicles can greatly improve your datas organization.
The vehicle will automatically save any data collected
to the specified file. Prior to deployment, create
subdirectories within each default folder (Missions,
Images, Logs) that allow you to quickly and easily find
appropritae data after each mission.







































































