













深圳市璞数技术有限公司
PAGE 13 OF 14
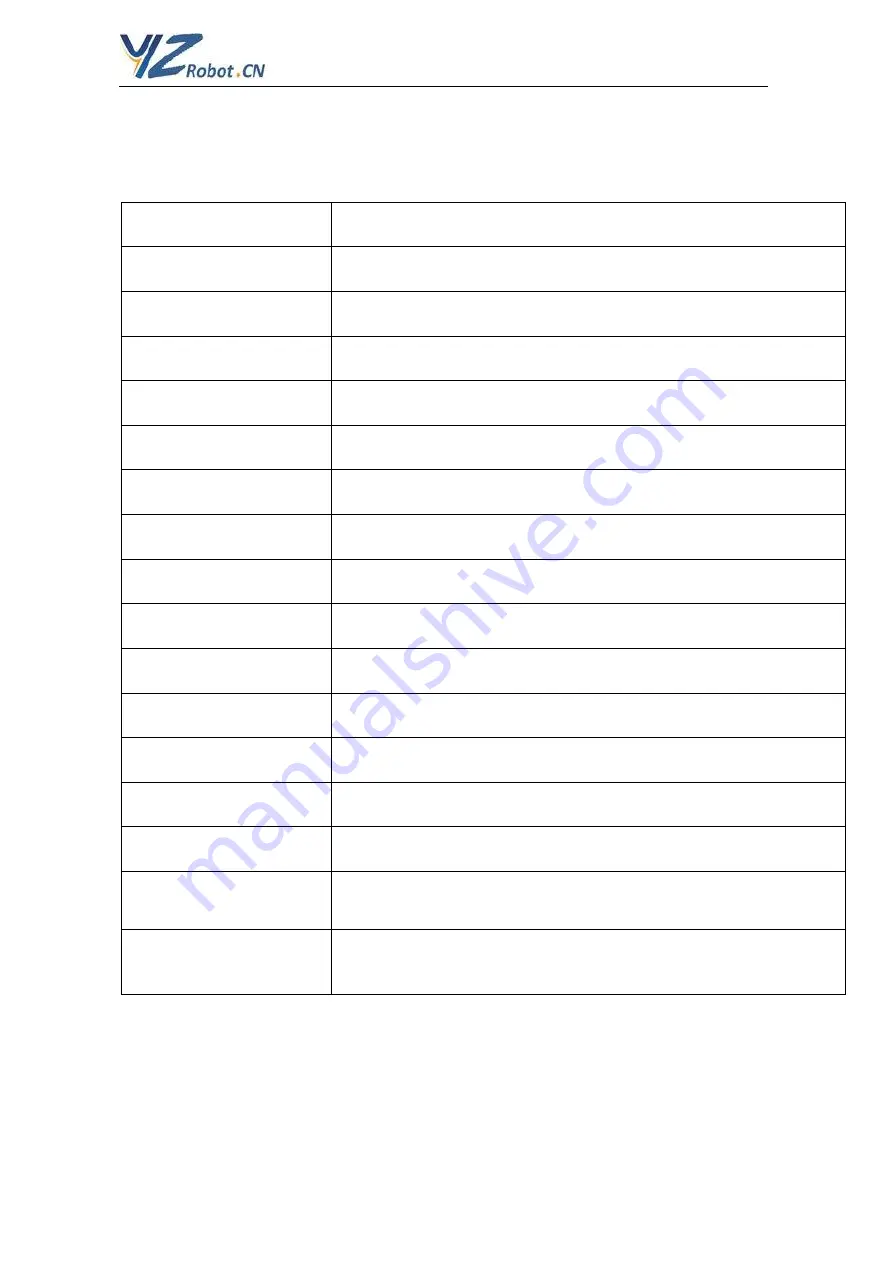
§4 ROSYZ-02 Datasheet
Move base size
86
0X
60
0X3
8
0 mm
Move base weight
45
KG(not including battery)
Move drive mode
two-wheel differential
Battery required
2
4
V20AH VRLA battery-pack
Motor type
24V
300
W
DC
motors
ROS communication
RS232
DCDC provided
5V2A
、
12V2A
、
19V
4
A
Move speed
0.1-
1.4
m/s (5km/hour)
Maximum load weight
80
KG
Externa charger
29.4V6A smart charger
Auto charging guide
Optional
Control Board
STM32F10X ARM chip
Emergency stop
Push RED button
Upper layer height
30CM
Hardware data provided
All electronic schematic drawings are provided
ROS diver provided
Provide ROS node binary file which can output each wheel’s ticks and
accept setting speed value
ROS demo
Provide a basic keyboard remote control moving demo application.
C++ source code of this demo is used.







































































