




























AEMZP0BA - EPS-AC0 - User Manual
Page - 51/95
11.2.2 Stepper Motor & AUTC
When the Automatic Centering (AUTC) is required on a truck working open loop in
manual mode (stepper motor), it is necessary to guide the truck in automatic mode
and to perform the following steps:
Step1
Roll-up or down the adjustments SET STEER 0-POS to get the truck
straight travelling when automatic centered.
11.2.3 RTC only or RTC & AUTC
In a truck working closed loop in manual mode (with a Twin Pot connected on the
Return To Center handlebar) with or without the AUTC function, it is necessary to
perform the following steps:
Step1
Release the handlebar in its straight-ahead rest position and acquire the
adjustments ZERO SP POT (to record the rest twin pot voltage).
Step2
Roll-up or down the adjustments SET STEER 0-POS to get the truck
straight travelling when the handlebar is straight ahead.
Summary of Contents for EPS-AC0
Page 23: ...AEMZP0BA EPS AC0 User Manual Page 23 95 6 2 EPS AC0 Stepper Motor diagram Figure 6 2...
Page 24: ...Page 24 95 AEMZP0BA EPS AC0 User Manual 6 3 EPS AC0 Twin pot diagram Figure 6 3...
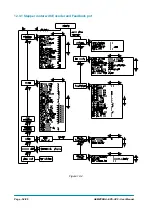
Page 55: ...AEMZP0BA EPS AC0 User Manual Page 55 95 12 3 2 RTC with Encoder and Feedback pot Figure 12 3...







































































