





























MUGL
Page 23 of 38
rev. 18 November 2009
10.5 Technique for adjusting the loops
The adjusting of PID loops must be done in two phases, first the inner one and then the
external one.
In order to adjust and verify the dynamic performances, it’s better to have a dynamic
load at the output so to visualize the voltage variations with respect to the load
variations.
Under these conditions adjust first the inner loop
Kp, Ti
Kp, Ti
Kp, Ti
Kp, Ti
and
Td
Td
Td
Td
parameters until the
maximum performances are obtained.
Once the inner loop has been adjusted, the parameters
Kp, Ti
Kp, Ti
Kp, Ti
Kp, Ti
and
Td
Td
Td
Td
of the external loop
can be adjusted so to optimize the global performance.
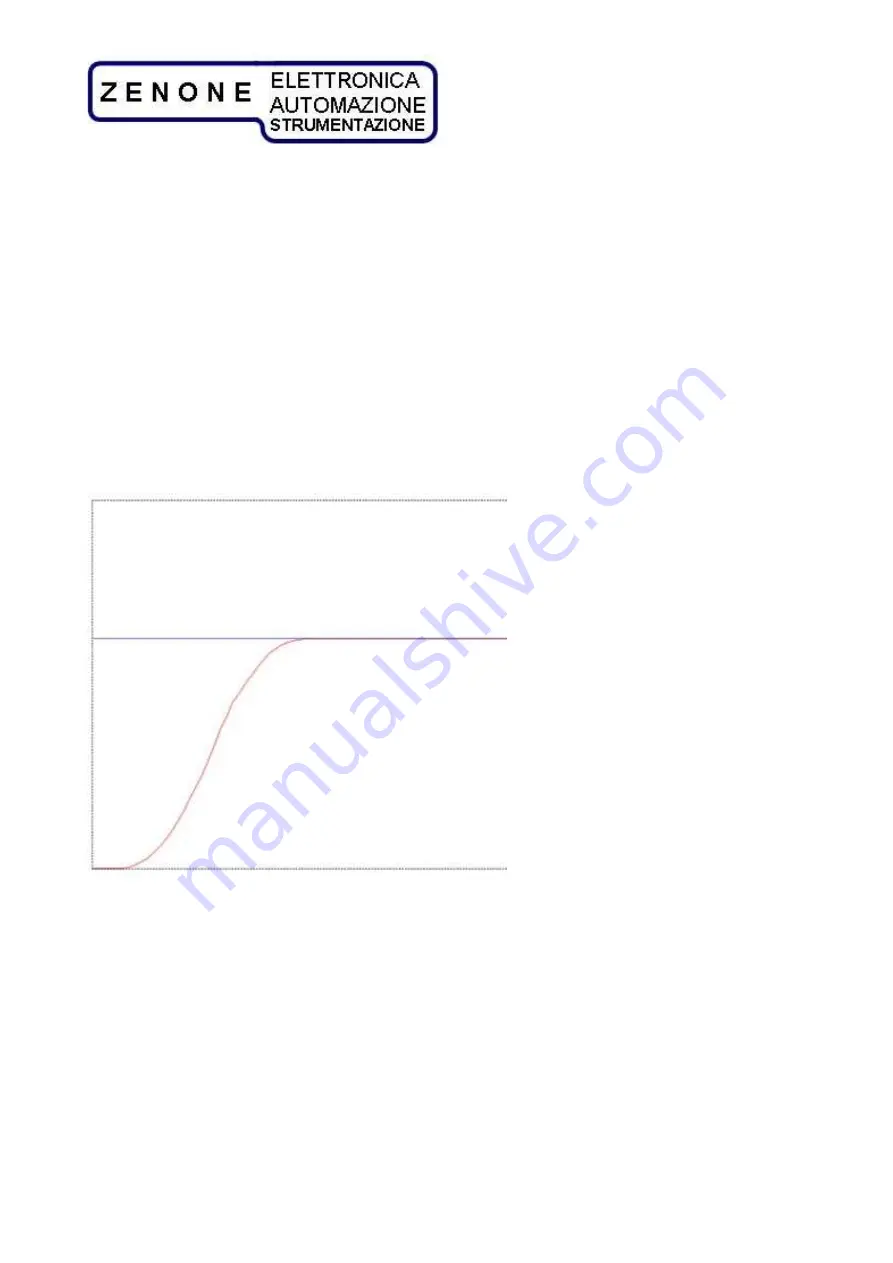
Ideal system response to a step
function







































































