





























E&M Ports
7-9
Tx TLP
The Transmit TLP setting controls the amount of gain or loss added to the voice signal coming
in from the local CPE before it is encoded to digital PCM. To increase the incoming signal
level, set the Tx TLP field to a negative value (i.e., the more negative the number, the more
gain is added). To decrease the signal level, set the Tx TLP setting to a positive number (i.e.,
the more positive the number, the more the signal level is decreased). For example, an
incoming signal at -16 dBm can be increased to 0 dBm by setting Tx TLP to -16 dB. For the
IMACS-200 E&M ports, this range is-16.5 dB to +7.5 dB.
CODING
The Coding field sets the PCM companding (coding) method used for a port. Changing the
coding field will apply the coding type selected to all four ports. Generally, the North
American T1 environment uses u-law (mu-law) coding, and the European E1 envisonment
uses a-inv. The coding default setting is defined by the type of associated WAN or OWAN
port.
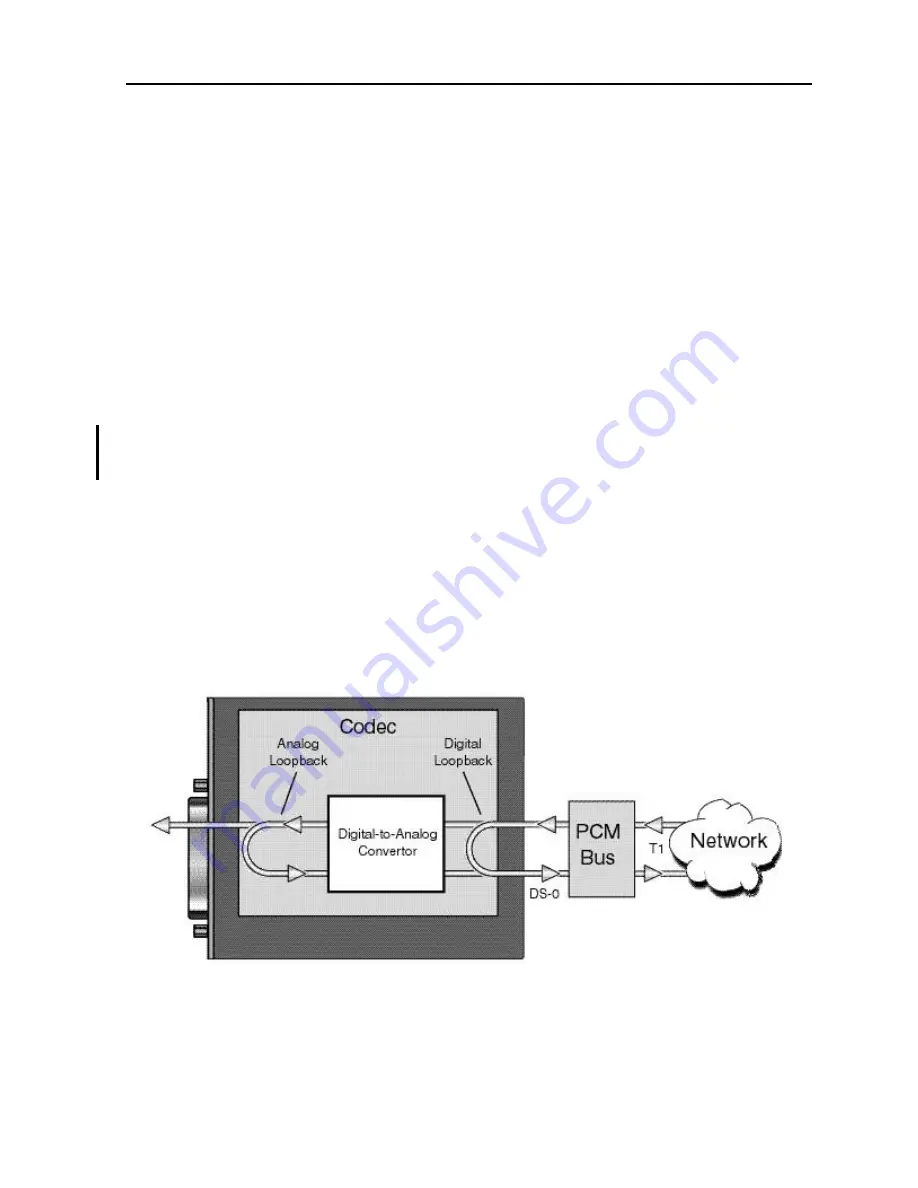
LB
The LB setting allows you to loop a port back toward the network and far end for testing and
troubleshooting. Figure 7-6 shows the available loopbacks. The dgtl (digital) loopback sends
the incoming digital signal from the network back toward the far end, without decoding it. The
anlg (analog) loopback sends the decoded analog signal back to the far end. To disable either
loopback after testing, set this field to off.
Figure 7-6. E&M port Loopbacks
Summary of Contents for IMA CS-200 System
Page 18: ...8 Table of Contents Model No Running Head Table of Contents...
Page 22: ...4 List of Figures Model No Running Head List of Figures...
Page 130: ...4 46 General Features Model No Running Head CPU Troubleshooting IMACS 200 General Features...
Page 148: ...5 18 WAN Ports Model No Running Head WAN port Troubleshooting WAN ports...
Page 202: ...9 14 High Speed Data Ports Model No Running Head...
Page 208: ...10 6 OHSU Ports Model No Running Head...
Page 230: ...12 16 IPR Model No Running Head IPR Configuration Screens and Settings IP Routing...
Page 264: ...A 12 System Standards and Specifications Model No Running Head IPR Server Specifications...
Page 274: ...B 10 Error Messages Model No Running Head...
Page 294: ...20 Glossary Model No Running Head Zero Code Suppression...







































































