























INSTALLATION AND OPERATING INSTRUCTIONS:
GEH6000IL/GED6000IL
INSTALLATION AND OPERATING INSTRUCTIONS:
GEH6000IL/GED6000IL
46
47
EN / 2021-07-28
DDOC00212 / 0
EN / 2021-07-22
DDOC00212 / 0
Zimmer GmbH
•
Am Glockenloch 2
•
77866 Rheinau, Germany
•
+49 7844 9138 0
•
www.zimmer-group.com
Zimmer GmbH
•
Am Glockenloch 2
•
77866 Rheinau, Germany
•
+49 7844 9138 0
•
www.zimmer-group.com
11.14.4.2
Group 70 Force profile – inside gripping
In movement profile group 70, the product in the ForceProfile moves
from the WorkPosition toward the BasePosition onto the workpiece using
the ControlWord command 0x0100.
When the workpiece is gripped, the configured gripping force is built up
and maintained by the motor current.
If no workpiece is gripped during the gripping process, a movement to
BasePosition takes place and braking starts at this position. As a result,
the product moves slightly behind the configured position before it turns
around and comes to a stop at the BasePosition. This enables secure
gripping of workpieces up to the BasePosition.
For opening, ControlWord command 0x0200 is written. Then the product
moves away from the workpiece to the WorkPosition in the Positi-
onProfile without the need for any prompts from the operator. Here, the
product moves at the speed set in the DriveVelocity parameter.
72 – Force profile – standard without self-locking mechanism
When starting from the WorkPosition, an unlocking operation is run for releasing. Only then does the product start moving
toward the workpiece. When the workpiece is gripped, the configured gripping force is built up and maintained by the
motor current.
Group 70 – Inside gripping
DeviceMode
Action
ControlWord
72
Move toward the WorkPosition for opening the product.
0x0200
72
Move toward the BasePosition until this position or the workpiece is reached.
0x0100
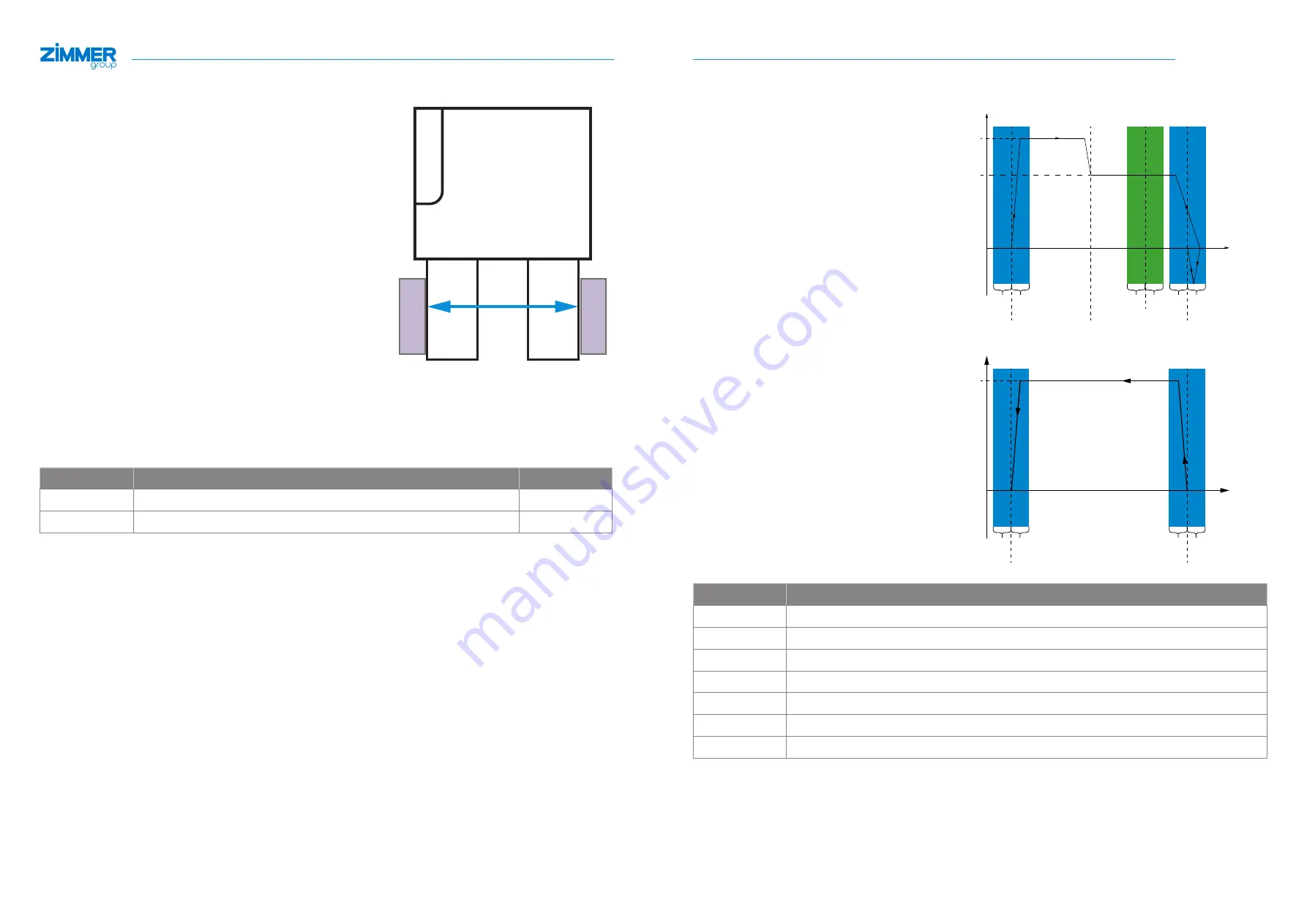
11.14.5
Pre-positioning – Force profiles
The following modes can be used for force-fit
gripping of workpieces.
The gripping force is built up by the movement
speed of the gripper jaws and the motor
current. To do this, the product calculates
the required movement speed (GripVelocity)
automatically from the GripForce parameter.
For opening, a movement automatically
takes place toward the standby position at
DriveVelocity. To do this, the product switches
into positioning mode automatically.
The difference to DeviceModes 60/70 is in the
use of pre-positioning. Therefore, this mode is
particularly suitable for time-optimized gripping
with long strokes followed by force-fit .
The graphic applies to Mode Group 80 and
thus shows outside gripping.
For Mode Group 90, exchange the BasePo-
sition and the WorkPosition.
Gripping (in the direction of WorkPosition):
WorkPosition
Speed in %
DriveVelocity
BasePosition
Position in mm
PositionTolerance (PT) PT
PT
PT
PT
PT
ShiftPosition
TeachPosition
GripVelocity
(calculated)
Open:
WorkPosition
Speed in %
DriveVelocity
BasePosition
Position in mm
PositionTolerance (PT) PT
PT
PT
DeviceMode
Action
BasePosition
Open position
ShiftPosition
Toggle position from positioning to gripping
WorkPosition
Closed position – behind the workpiece
GripForce
Desired gripping force
TeachPosition
Expected position of the workpiece
PositionTolerance
Permitted tolerance for the position window
DriveVelocity
Opening speed







































































