























9
6 Functional description
The product has very high gripping force to
ensure the safe handling of heavy workpieces.
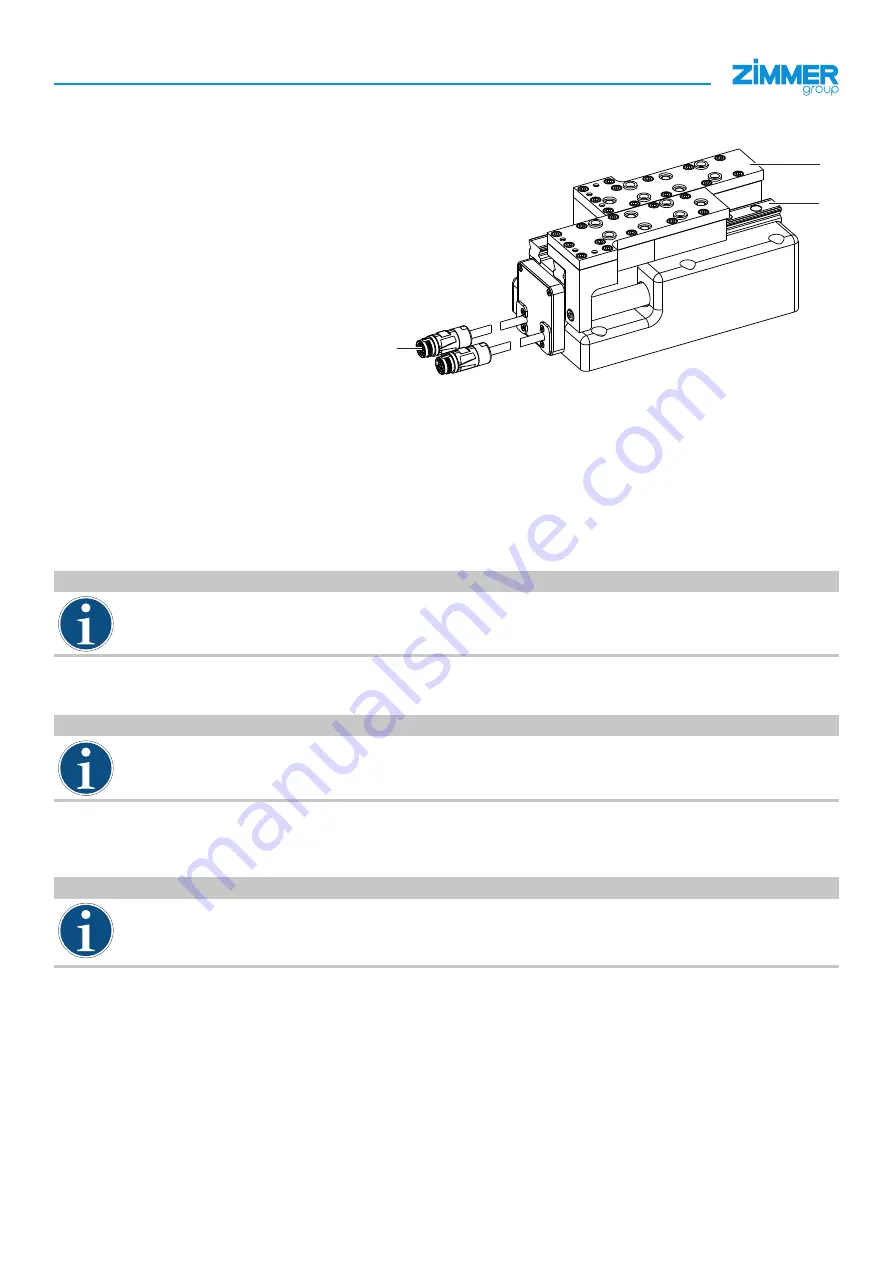
1
2
3
The servo drive governs the position, speed
and force.
If the energy supply is lost, the workpiece is
stopped by the self-locking mechanism of the
product.
The gripper jaws of the product are arranged
parallel to each other on two opposing guide
rails and can be moved relative to each other.
You can individually equip the gripper jaws,
which run parallel to one another.
1
Power supply
2
Gripper jaw
3
Guide rail
6.1 Position measuring system
The drive of the product has a motor with single-turn absolute encoder with 20-bit resolution.
The single-turn absolute encoder is used for absolute indirect position measurement within a motor revolution.
INFORMATION
When this single-turn absolute encoder variant is used, the absolute axis position is lost after the voltage is shut
off.
To use this absolute encoder as a 20-bit multiturn absolute encoder, we recommend using the battery box contained in the
scope of delivery of the converter.
INFORMATION
When this multiturn absolute encoder variant is used, the absolute axis position is maintained with the battery
buffer even after the voltage is shut off.
The multiturn absolute encoder is used for absolute indirect position measurement within 66,536 motor revolutions. If the
motor is disconnected from the battery box, the information about the absolute axis position is lost after about one minute.
The multiturn absolute encoder replaces a separate absolute value at the motor.
INFORMATION
Using the multiturn absolute encoder requires buffer storage via an external battery. The following accessories
must be used for this:
• Battery box SUP-E02-MSM-BATTERYBOX-xxx
INSTALLATION AND OPERATING INSTRUCTIONS:
GEH8000
DDOC00262 / e
EN / 2023-03-06
Zimmer GmbH • Im Salmenkopf 5 •
77866 Rheinau, Germany •
+49 7844 9138 0 • www.zimmer-group.com







































































